pc.png)
デジタルオシロスコープの基礎と概要 (第3回)
<連載記事一覧>
第1回:「はじめに」「歴史の長いオシロスコープ」「オシロスコープをさまざまな視点で分けてみる」「オシロスコープの選定ポイント」「【コラム】デジタルオシロスコープの登場に貢献した高速A/D変換器」
第2回:「オシロスコープの基本仕様の理解」「オシロスコープのトリガ機能」「パラメータ測定および演算機能」「波形データの印字、保存、通信」「【コラム】国内で販売されているデジタルオシロスコープ」
第3回:「さまざまなプローブ」「デジタルオシロスコープの校正」「おわりに」「【インタビュー】テクトロニクス社のオシロスコープ事業への取り組み」
さまざまなプローブ
オシロスコープにはおおよそ下記のようなプローブが接続される。用途に応じて適切なプローブを選択して使う。
ここではよく使われるプローブについて概要と使用上の注意点を述べる。
図39. オシロスコープに接続される主なプローブ

標準(受動)プローブ
オシロスコープを購入すると本体に添付されている標準(受動)プローブである。添付されているプローブ以外もあるため、用途に応じて選ぶことができる。
標準(受動)プローブはおおよそ下記のような構造になっている。オシロスコープの入力抵抗は1MΩであるが、標準(受動)プローブのプローブヘッドに9MΩの抵抗が入っているためプローブから見た入力抵抗は10MΩとなる。測定対象物にオシロスコープを直接接続すると直流抵抗が1MΩであるが、10:1プローブを介して接続すると10MΩとなるため負荷効果は1/10となり、より正確な波形観測ができる。
図40. 10:1標準(受動)プローブの構造

高周波の信号を測定するときは入力容量が負荷となって信号に影響するため、プローブの仕様に書かれている負荷容量を確認する必要がある。下記にはテクトロニクス社の標準(受動)プローブを示すが、入力容量が製品によって異なっていることが判る。入力容量を小さくして測定したい場合はアクティブ・シングルエンドプローブを使うという選択がある。
また、オシロスコープ入力に合わせた専用コネクタになっている製品もあるので選定には確認が必要である。
| 分類 | 型名 | 減衰比 | 周波数帯域 | 入力インピーダンス | コネクタ |
|---|---|---|---|---|---|
| 1:1受動電圧プローブ | P6101B | 1:1 | 15MHz | 1M || 100pF |
TekProbe LEVEL1 |
| 1:1 / 10:1切替式 受動電圧プローブ | P2220 | 1:1/10:1 | 10:1:200MHz | 10:1:10M || 110pF | BNC |
| 1:1:6MHz | 1:1:1M || 17pF | ||||
| P2221 | 1:1/10:1 | 10:1:200MHz | 10:1:10M || 110pF | BNC | |
| 1:1:6MHz | 1:1:1M || 17pF | ||||
| 2:1受動電圧プローブ | TPP0502 | 2:1 | 500MHz | 2M || 12.7pF | TekVPI |
| 10:1受動電圧プローブ | TPP0051 | 10:1 | 50MHz | 10M || 12pF | BNC |
| TPP0100 | 10:1 | 100MHz | 10M || 12pF | BNC | |
| TPP0101 | 10:1 | 100MHz | 10M || 12pF | BNC | |
| TPP0200 | 10:1 | 200MHz | 10M || 12pF | BNC | |
| TPP0201 | 10:1 | 200MHz | 10M || 12pF | BNC | |
| TPP0250 | 10:1 | 250MHz | 10M || 3.9pF | TekVPI | |
| TPP0500B | 10:1 | 500MHz | 10M || 3.9pF | TekVPI | |
| TPP1000 | 10:1 | 1GHz | 10M || 3.9pF | TekVPI | |
| P3010 | 10:1 | 100MHz | 10M || 13pF |
TekProbe LEVEL1 |
|
| P5050B | 10:1 | 500MHz | 10M || 11pF |
TekProbe LEVEL1 |
|
| P6139B | 10:1 | 500MHz | 10M || 8pF |
TekProbe LEVEL1 |
|
| THP0301 | 10:1 | 300MHz | 10M || 11pF | BNC | |
| 注)TPP0502、TPP1000、TPP0500B、TPP0250 TekVPIコネクタはキー付きとなっている | |||||
プローブには測定対象から正確な波形を容易に取り込めるようにするために多くのアクセサリが用意されている。特に高密度実装されたプリント基板上の信号を観測するときはアクセサリが必要となる。
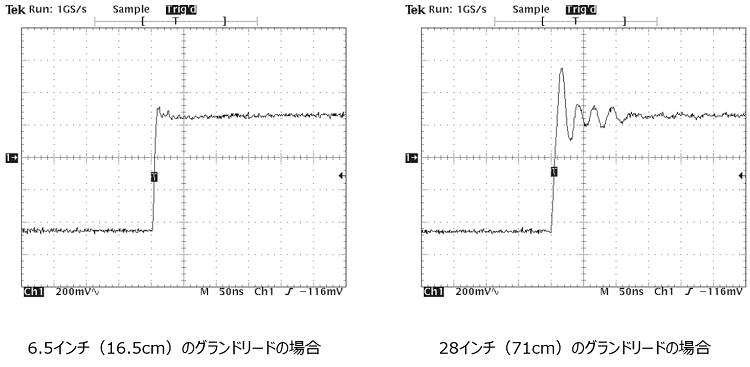
標準(受動)プローブを使用する際の注意点は波形を観測する前にCAL端子から出力されている方形波を使って調整を行うこと、高周波の測定を行う際にはプローブのグランドリードの影響を少なくするために短く接続することが必要である。
図41. 標準(受動)プローブ調整 調整用ドライバで真ん中の波形のように先端部を直角にする

グランドリードを長くするとケーブルインダクタンスの影響によって観測波形に乱れが生じる。高周波計測を行う場合はグランドリードを使わないで、グランド・スプリングや基板-プローブ・チップ・アダプタなどを利用する。
図42. プローブのグランドリード長の影響
最近のオシロスコープにはプローブの調整を手動でなく、自動で行える機能を持つものがある。
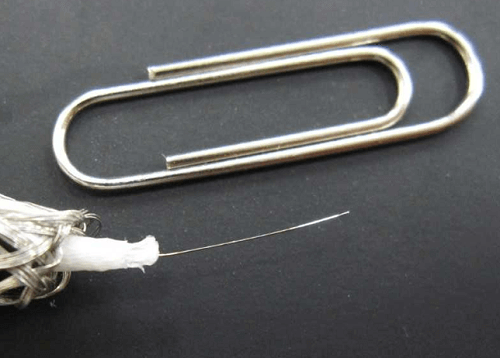
受動プローブは浮遊容量低く抑え安定した値にするために、通常の同軸ケーブルやシールド線に比べてケーブルの芯線は極めて細いものとなっている。ケーブルに無理な力が掛かると断線する恐れがあるので、プローブを巻いて保管するときの取扱いには注意が必要である。
また、受動プローブに使われているケーブルの芯線は高インピーダンス線であるために、一般に市販されている芯線が低インピーダンス(銅)線のシールドケーブルや同軸ケーブルとは特性が異なる。受動プローブのケーブルが断線した場合にシールド線などで断線した部分をつなぐと本来のプローブの性能が得られなくなる。このため受動プローブが断線したときは新品に交換することになる。
図43. テクトロニクス社の標準(受動)プローブTPP0500のケーブル芯線(直径 約0.1mm)
また、電位を持った端子にグランドリードを接続すると、短絡電流が流れてプローブを破損することがある。例えば標準(受動)プローブでコンセントの交流波形を観測しようとして、グランドリードがLINE側に接続したときはプローブが破損したり、ブレーカが動作して周辺の装置の電源が遮断される。危険であるのでコンセントの電圧波形観測に標準(受動)プローブを使ってはならない。
高電圧プローブ
高電圧プローブは1000V以上の高電圧波形を観測するためにある。テクトロニクス社の高電圧プローブは下記の製品がある。
| 型名 |
周波数 帯域 |
減衰比 | 入力インピーダンス | 最大電圧 | ディレーティング 電圧 |
ケーブル長 (遅延時間) |
コネクタ |
|---|---|---|---|---|---|---|---|
| P5122 | 200MHz | 100:1 | 100M || 4pF | RMS: 1000V CAT II | 10V rms(200MHz) | 1.2m | BNC |
| P5100A | 500MHz | 100:1 | 40M || 2.5pF |
RMS:1000V CAT II 2.5kV DC+ピークAC |
20V rms(500MHz) |
2m (8.7ns) |
TekProbe LEVEL1 |
| P5150 | 500MHz | 50:1 | 40M || 3.8pF |
RMS:1000V CAT II 2.5kV DC+ピークAC |
20V rms(500MHz) |
2m (8.7ns) |
BNC |
| TPP0850 | 800MHz | 50:1 | 40M || 1.8 pF |
RMS:1000V CAT II 2.5kV DC+ピークAC |
25V rms(800MHz) |
1.3m (6.1ns) |
Tek VPI |
| P6015A | 75MHz | 1000:1 | 100M || 3pF | 20kV DC+ピークAC | 2kV(50MHz) |
3m (14.7ns) |
TekProbe LEVEL1 もしくは BNC |
| 注)TPP0850のTekVPIコネクタはキー付きとなっている | |||||||
高電圧プローブを選ぶ際には周波数によるディレーティング電圧を確認する必要がある。例えば低い周波数で20kVまで使える高電圧プローブP6015Aは50MHzでは2kVまでしか使えない。詳細は仕様に下図が書かれているので、観測する周波数から上限電圧の事前に確認する必要がある。
図44. テクトロニクス社の高電圧プローブP6015Aの最大入力電圧定格(ACピーク)

また、高圧プローブを使って波形観測を行う際には安全を確保するためにオシロスコープ本体は必ず接地して利用する。
高電圧差動プローブ
パワーエレクトロニクス機器でコモンモード電圧を持った2点間の電圧波形観測を行う場合が多いので、高電圧差動プローブがよく使われる。下記にテクトロニクス社の高電圧差動プローブを示す。
| 型名 | 周波数帯域 | 減衰比 | 最大差動電圧 | 最大対地電圧 |
ディレーティング 電圧 |
CMRR(代表値) |
|---|---|---|---|---|---|---|
| P5200A | 50MHz | 50:1 / 500:1 |
±1300V DC + peak AC |
1000V rms(CAT II) | 35V rms(50MHz) |
DC:80dB 以上 100kHz:60dB 以上 3.2MHz:30dB 以上 50MHz:26dB 以上 |
| P5202A | 100MHz | 20:1 / 200:1 |
±640V DC + peak AC |
300V rms(CAT II) | 20V rms(100MHz) |
DC:80dB 以上 100kHz:60dB 以上 3.2MHz:40dB 以上 50MHz:30dB 以上 |
| P5205A | 100MHz | 50:1 / 500:1 |
±1300V DC + peak AC |
1000V rms(CAT II) | 20V rms(100MHz) |
DC:80dB 以上 100kHz:60dB 以上 3.2MHz:40dB 以上 50MHz:30dB 以上 |
| P5210A | 50MHz | 100:1 / 1000:1 |
±5600V DC + peak AC |
2300V rms(CAT I) | 30V rms(50MHz) |
DC:80dB 以上 100kHz:60dB 以上 3.2MHz:40dB 以上 50MHz:30dB 以上 |
| TMDP0200 | 200MHz | 25:1 / 250:1 |
±750V DC + peak AC |
550V rms(CAT I) | 15V rms(50MHz) |
DC:-80dB 以上 100kHz:-60dB 以上 3.2MHz:-30dB 以上 100MHz:-26dB 以上 |
| THDP0200 | 200MHz | 50:1 / 500:1 |
±1500V DC + peak AC |
1000V rms(CAT II) | 15V rms(100MHz) |
DC:-80dB 以上 100kHz:-60dB 以上 3.2MHz:-30dB 以上 100MHz:-26dB 以上 |
| THDP0100 | 100MHz | 100:1 / 1000:1 |
±6000V DC + peak AC |
2300V rms(CAT I) | 15V rms(100MHz) |
DC:-80dB 以上 100kHz:-60dB 以上 3.2MHz:-30dB 以上 100MHz:-26dB 以上 |
差動プローブも高電圧プローブと同様にディレーティング電圧に注目する必要がある。高い周波数の電圧測定を行う場合は事前にディレーティング電圧を確認する必要がある。
図45. テクトロニクス社の高電圧差動プローブTHDP0200の電圧ディレーティング

インバータでモータを駆動する回路のハイサイド(上アーム)のトランジスタの挙動を、高電圧差動プローブを使って観測する場合を示す。ハイサイド側は大きなコモンモード電圧が印加されるため、正確な波形観測ではCMRR(Common Mode Rejection Ratio、同相信号除去比)の仕様に注目する必要がある。
図46. 高電圧差動プローブによるインバータの測定

実際のインバータの波形観測でCMRRの影響を見るには、下図に示すように高電圧差動プローブの両端子をコモンモード電圧が大きく変化する点に接続するとコモンモードの影響が判る。
図47. CMRRの影響を確認する方法

インバータの測定などノイズが多くある環境下で、高電圧差動プローブを使う場合はノイズの影響を低減させるため、下図のように入力リードをツイストして使うことを勧める。
図48. 入力リードのツイスト

光絶縁プローブ
高電圧差動プローブと同じような目的で作られたプローブであるが、高電圧差動プローブに比べてCMRRの仕様が優れているので、コモンモード電圧が印加された信号の正確な波形観測ができる。ただし製品の構造が複雑なため、価格は高電圧差動プローブに比べて高額となる。
| 型名 | 周波数帯域 | 立上り時間 | ケーブル長 |
最大差動入力 電圧 |
最大入力 オフセット・レンジ |
最大コモン・モード 電圧 |
インタフェース |
|---|---|---|---|---|---|---|---|
| TIVM1 | 1GHz | 350ps以下 | 3m | ±50V*1 | ±100V*1 | 60kV | Tek VPI |
| TIVM1L | 1GHz | 350ps以下 | 10m | ±50V*1 | ±100V*1 | 60kV | Tek VPI |
| TIVH08 | 800MHz | 450ps以下 | 3m | ±2500V*2 | ±2500V*2 | 60kV | Tek VPI |
| TIVH08L | 800MHz | 450ps以下 | 10m | ±2500V*2 | ±2500V*2 | 60kV | Tek VPI |
| TIVH05 | 500MHz | 700ps以下 | 3m | ±2500V*2 | ±2500V*2 | 60kV | Tek VPI |
| TIVH05L | 500MHz | 700ps以下 | 10m | ±2500V*2 | ±2500V*2 | 60kV | Tek VPI |
| TIVH02 | 200MHz | 1.8ns以下 | 3m | ±2500V*2 | ±2500V*2 | 60kV | Tek VPI |
| TIVH02L | 200MHz | 1.8ns以下 | 10m | ±2500V*2 | ±2500V*2 | 60kV | Tek VPI |
| *1 IVTIP50X使用時 *2 WSQPIN2500X使用時 | |||||||
図49. テクトロニクス社の光絶縁プローブの構造

光絶縁プローブのCMRR特性はプローブチップによって異なる。また周波数特性を持っているので用途に応じたプローブチップの選択が必要である。
図50. テクトロニクス社の光絶縁プローブTIVHシリーズのCMRR特性
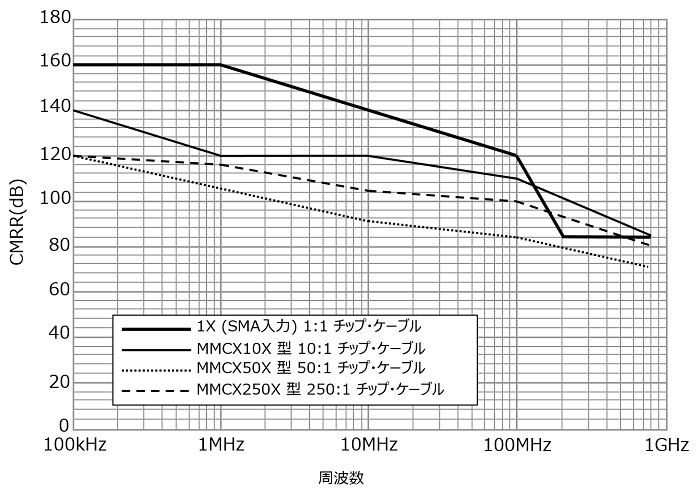
1:1 SMAケーブルおよびMMCXシリーズ・プローブ・チップ・ケーブルのCMRR(代表値)
低電圧差動プローブ
車載ネットワークで使われているCANやパソコンにあるイーサネット、USB、HDMIで採用されているシリアル伝送線の通信信号はコモンモードノイズの影響を受けないように差動信号で伝送される。このような信号を測定する場合は広帯域な低電圧差動プローブを利用する。テクトロニクス社の低電圧差動プローブは1GHzから33GHz帯域までの製品がある。高速伝送路の評価は時間ジッタや電圧ノイズをアイパターンによって評価するため正確な波形観測が必要となる。
低電圧プローブの非破壊最大入力電圧は低いので、高電圧入力や静電気によって破損することがあるので注意が必要である。
アクティブ・シングルエンドプローブ
アクティブ・シングルエンドプローブの起源は古く、1950年代後半に真空管を使ったカソードフォロアープローブが作られていた。その後、真空管が半導体素子に置き換えられて小型化と広帯域化が進んだ。アクティブ・シングルエンドプローブはFETプローブと言われることがあるが、必ずしもFET素子が使われているわけではない。
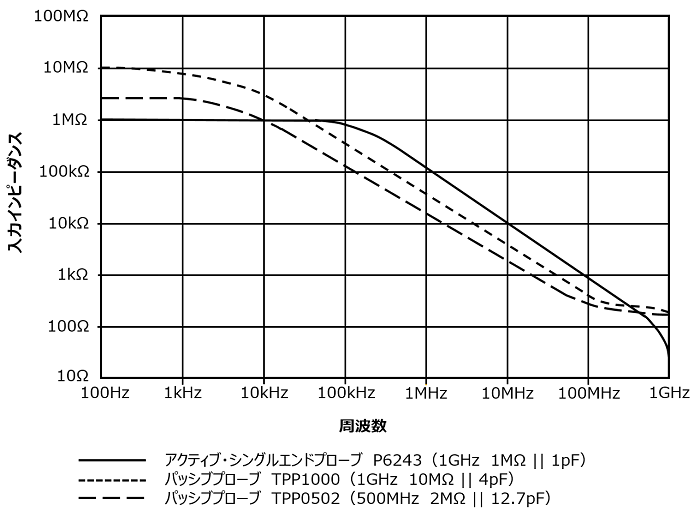
アクティブ・シングルエンドプローブは入力容量が小さいため、高い周波数の信号を観測するときに使われる。下記にはアクティブ・シングルエンドプローブと入力容量の異なる受動プローブの入力インピーダンスの周波数特性を示す。100kHz以上の周波数ではアクティブ・シングルエンドプローブが優位であることが判る。
図51. テクトロニクス社のアクティブ・シングルエンドプローブの入力インピーダンス周波数特性
テクトロニクス社のアクティブ・シングルエンドプローブの仕様を下記に示すが、いずれも非破壊入力電圧が低いため、取扱いを注意しないと破損する危険がある。特に静電気に注意が必要で、アクティブ・シングルエンドプローブを使うときは帯電防止リスト・ストラップを使用する。
| 型名 |
周波数帯域 (-3dB) |
立上り 時間 |
減衰比 | 動作電圧 |
非破壊 入力電圧 |
オフセット 電圧 |
入力容量 | 入力抵抗 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| P6243 | 1.0GHz | 350ps | 10:1 | ±8V | ±15V | - | 1pF | 1MΩ | ||
| P6245 | 1.5GHz*1 | 267ps | 10:1 | ±8V | ±15V | ±10V | 1pF | 1MΩ | ||
| TAP1500 | 1.5GHz | 267ps | 10:1 | ±8V | ±15V | ±10V | 1pF | 1MΩ | ||
| TAP2500 | 2.5GHz | 140ps | 10:1 | ±4V | ±30V | ±10V | 0.8pF | 40kΩ | ||
| TAP3500 | 3.5GHz | 130ps | 10:1 | ±4V | ±30V | ±10V | 0.8pF | 40kΩ | ||
| *1 P6245型では代表値 | ||||||||||
AC/DC電流プローブ
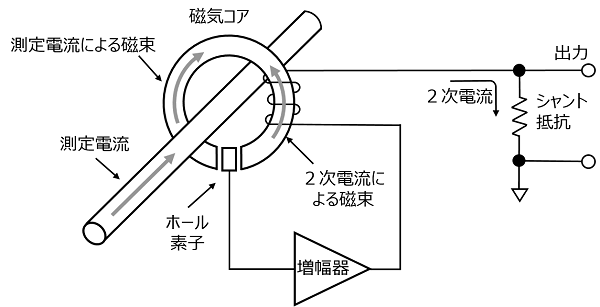
AC/DC電流プローブは1960年代後半に登場している。基本的な構造は当時と大きく変わっていないが、小型化と高性能化が進んだ。電流センサにはさまざまな方式があるが、広帯域でAC/DC電流を測定できるのは下図に示すホール素子を使った磁気平衡式である。
図52. 磁気平衡式広帯域AC/DC電流センサの構造
AC/DC電流プローブを利用するうえで注意が必要なのは周波数ディレーティングである。高い周波数の電流波形を観測すると磁気コアの損失により発熱が生じる。このため利用できる上限値が周波数によって異なるので注意が必要である。また上限値は温度にも依存する。
図53. テクトロニクス社のTCP0020 型 AC/DC 電流プローブの周波数ディレーティング

もう一つ注意が必要なのはAC/DC電流プローブによる挿入インピーダンスである。低い周波数では大きな値ではないが、高い周波数の電流を観測するときは注意が必要である。
図54. テクトロニクス社のTCP0020 型 AC/DC 電流プローブの挿入インピーダンス対周波数

ロゴスキーコイル電流プローブ
ロゴスキーコイルはもともと大電流の交流信号を観測するのに使われていた。構造がシンプルで小型化しやすいため、最近ではパワートランジスタの端子電流波形を測定するなどパワーエレクトロニクス機器の開発で使われるようになってきた。
図55. ロゴスキーコイル電流センサの構造
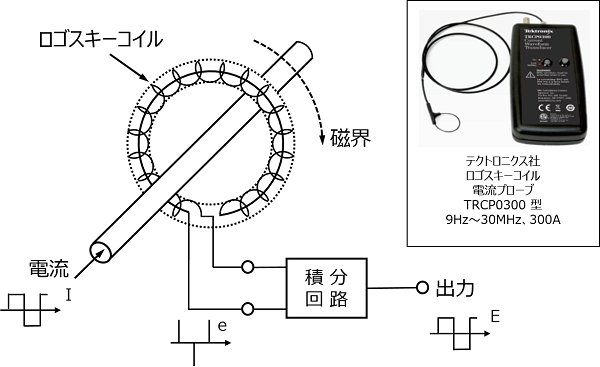
下記にはテクトロニクス社のロゴスキーコイル電流センサを示す。周波数帯域が直流からでないためパルス波形を観測した時はサグが生じる。
| 型名 | 周波数帯域 | 最大ピーク電流 | 最小電流 | 感度 | コイル断面直径 |
|---|---|---|---|---|---|
| TRCP0300 | 9.2Hz ~ 30MHz | 300A | 250mA | 20mV/A | 1.7mm |
| TRCP0600 | 12Hz ~ 30MHz | 600A | 500mA | 10mV/A | 4.5mm |
| TRCP3000 | 1.3Hz ~ 16MHz | 3000A | 500mA | 2.0mV/A | 8.5mm |
ロゴスキーコイルの部分は繊細な構造をしているので取扱いは丁寧に行う必要がある。波形観測では外部からの磁界の影響を受けやすい欠点を持っているため利用には注意が必要である。
【トピックス】新しい電流センサ「光ファイバ電流センサ」
2017年5月に光産業振興協会が光ファイバ電流センサの規格OITDA FS 01:2017を発表した。この電流センサは偏光した光が磁界に比例して偏波面が傾くというファラデー効果を利用したものである。現在は小型軽量で安全性の高い電流センサとして電力設備での利用が始まっている。光ファイバ電流センサの構造は下記のようになっている。
図56. 光ファイバ電流センサの構造
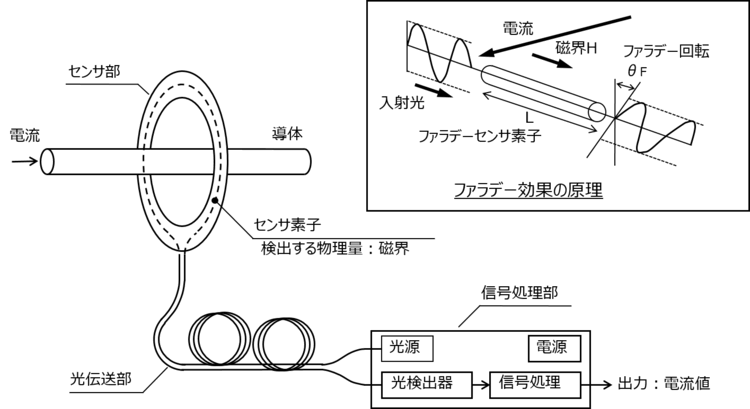
出典:光ファイバ電流センサ(光産業技術振興協会規格)
光ファイバ電流センサはファラデーセンサ素子に特殊なガラスファイバを利用するため、絶縁性が高く高電圧を取扱う電力設備への利用は最適である。また光による電流検出であるため、広帯域化が可能なこと、外部からの電気的なノイズの影響を受けないことなどオシロスコープと組み合わせての利用が可能である。
横河電機は2005年に光ファイバ電流センサの研究を行っていた東京電力から技術移転を受けて、測定用広帯域光ファイバ電流センサを高密度に実装された車載インバータの評価用に試作したことがある。
図57. 横河電機が試作した広帯域光ファイバ電流センサ

提供:横河電機
今後、パワーエレクトロニクス機器の高密度実装化やパワー半導体の高速化が進むとこのような新たな電流センサが登場する可能性がある。