車載ECUのインバータ技術~電動化に欠かせないコア技術
車載システムにおいて、モータなどで動力を発生させるアクチュエータ※1を駆動する代表的な技術がインバータ装置※2です。特に電動車※3では、動力性能や電費※4、システムの小型化に影響します。
本稿では、電動車のモータを駆動するインバータや電圧を変換するコンバータについて解説します。先ず、インバータやコンバータの定義、基本構造を説明します。具体的には自動車に搭載されているトラクションインバータ、DCDCコンバータ、オンボードチャージャなどを図解します。PWM制御によって三相モータへの指令信号が作られる様子を順番に解説します。さらに、インバータ装置を構成する主要な部品の技術を説明します。パワー半導体のIGBT、MOSFET、SiC、GaNのすみ分けや、モータ制御(ベクトル制御)、高電圧からの保護などです。最後にインバータ装置開発で使用される計測器を紹介します。
電気エネルギを機械的な動作へ変換する装置。
本稿ではインバータとコンバータを併せてインバータ装置と呼称。
電動車に関連する記事は以下をご覧ください。
- 2020年12月公開:「電動化システムの主要技術と規制動向~進展するxEVの現状と今後」
- 2021年9月公開:「電動化の進展~カーボンニュートラルに向けた動向」
内燃機関の燃費に相当する。内燃機関の車両では燃料1リットルあたりの走行距離を「km/l」で表記する。電動車では、「Wh/km」や「km/kWh」で表記される。各所の情報による代表的な電動車の電費を紹介する。なお、最新の情報は各社のサイトを参照のこと。
| OEM | 車種名 |
電費 (km/kWh) |
|---|---|---|
| BMW | i3 | 8.5 |
| ホンダ | Honda e | 8 |
| VW | ID.3 | 7.3 |
| メルセデスベンツ | EQE350 | 7.3 |
| 日産 | アリア B6 | 7.1 |
| トヨタ | bz4X FWD | 7.0 |
出典:各所のデータをもとに作成
《本稿の記述は、筆者の知見による解釈や、主観的な取り上げ方の面もあることをご容赦ください。また、本稿に記載されている技術情報は、当社および第三者の知的財産権他の権利に対する保証または実施権を許諾するものではありません。》
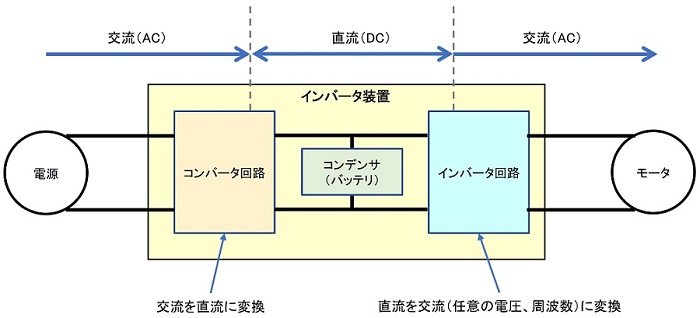
インバータ装置とは
本稿では、インバータ装置の定義を、「電源の電圧や周波数を制御して、モータなどの回転速度やトルクを制御する装置」とします。交流電源を直流電源へ変換する「コンバータ」と、直流電源を任意周波数の交流へ電力変換する「インバータ」とで構成されるシステムの総称です。直流電源を他の直流電圧へ変換する装置も「コンバータ」と呼称します。図1はインバータ装置の基本構成です。コンバータ回路は交流(AC)電源を直流電源(DC)へ変換します。インバータ回路は三相モータを駆動するために交流(AC)へ変換します。このような変換をパワー半導体で実現します。
インバータシステム
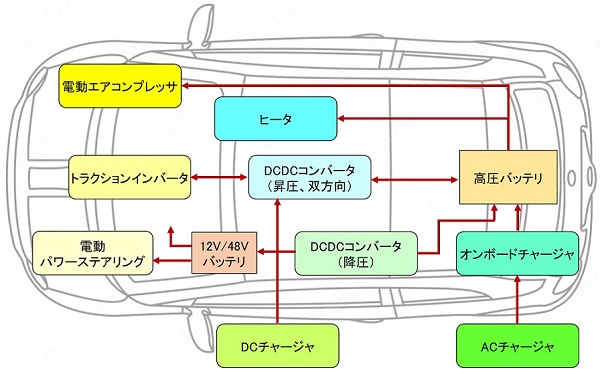
車載用インバータでは電圧型インバータが使われます。また、電力変換制御としてPWM方式(Pulse Width Modulation パルス幅変調)が主に採用されています。PWM方式については、後ほど解説します。電動車では多くのインバータが採用されています。図2は適用例です。コンバータは高圧バッテリから更に昇圧する昇圧コンバータが採用される例もあります。ライトやオーディオなどの補器類の電源である12V系へ変換する降圧コンバータが採用されています。
各システムの機能を解説します。
1 トラクションインバータ
先ず、インバータの基本動作について解説します。図3がインバータの基本形です。アームとレグとで構成されます。アームはスイッチ(SW)とダイオードで構成されます。ダイオードはコイルなどの誘導負荷から発生する逆電圧を電源へ還流させるために必要です。レグは上側と下側のアームで構成されます。
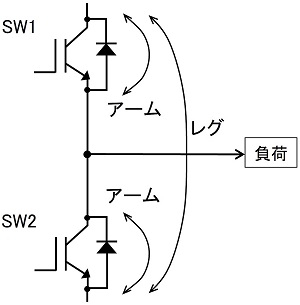
負荷を駆動するために2対のレグで構成された回路が図4です。
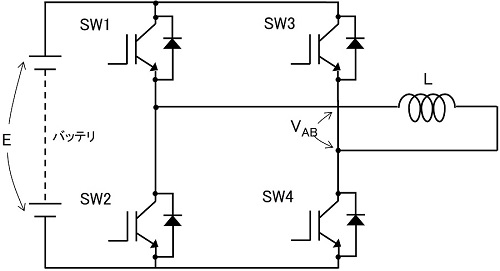
負荷を駆動する時、図4中の各SWと出力電圧との関係は表2です。出力電圧(VAB)に示す通り、負荷に対して+E、-Eが印可されるので直流電源(E)が交流へ変換されていることが理解できます。なお、各SWを切り替える際、各レグのアームが同時にONすると、電源とSWとが短絡することになり、パワー半導体の破損や劣化につながります。そのため、SWを切り替える際に所定のOFF時間を確保することが必要です。このOFF時間のことをデッドタイムと呼称されます。
| 動作状態 | SW1 | SW2 | SW3 | SW4 |
出力電圧 (VAB) |
|---|---|---|---|---|---|
| 1 | ON | ON | E | ||
| 2 | ON | ON | 0 | ||
| 3 | ON | ON | -E | ||
| 4 | ON | ON | 0 |
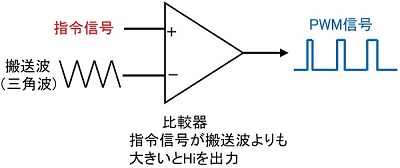
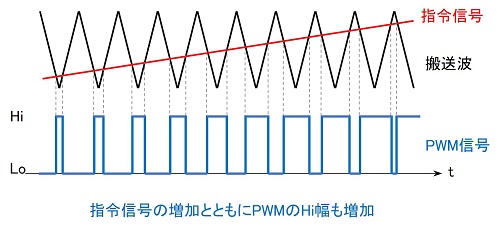
次に、インバータで主に採用されているPWM(Pulse Width Modulationパス幅変調)制御を概説します。図5はPWM信号の生成回路です。指令信号と搬送波を比較器に入力しPWM信号を生成します。搬送波は一般的に三角波が採用され、周波数は10kHz前後です。図6が示す通り、指令信号が搬送波よりも大きい時、比較器はHiを、小さい時はLoを出力します。生成されたPWM信号の周波数は搬送波と同じでHiの幅が指令信号に応じて生成されていることが判ります。指令信号が増加するとPWM信号のHiも増加します。
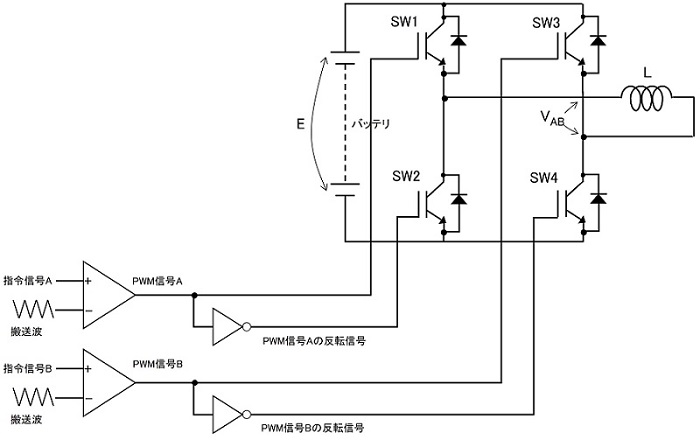
インバータの具体的な回路でPWM制御を解説します。図7は三相モータの1相分を切り出した回路です。2つのレグに負荷(L)が接続されています。各レグはPWM信号で駆動されます。なお、本回路では左側のレグと右側のレグに異なるPWM信号が与えられています。この方式はユニポーラ方式と言われる駆動方法です。他の方式としてはバイポーラ方式がありますが、本稿ではユニポーラ方式で解説します。バイポーラ方式との比較など、技術的な内容については他の技術情報をご覧ください。左側レグの上アームはPWM信号Aで、下アームはPWM信号Aの反転信号で駆動されます。右側レグはPWM信号BとPWM信号Bの反転信号で駆動されます。上アームと下アームを切り替える時はデッドタイムが必要です。
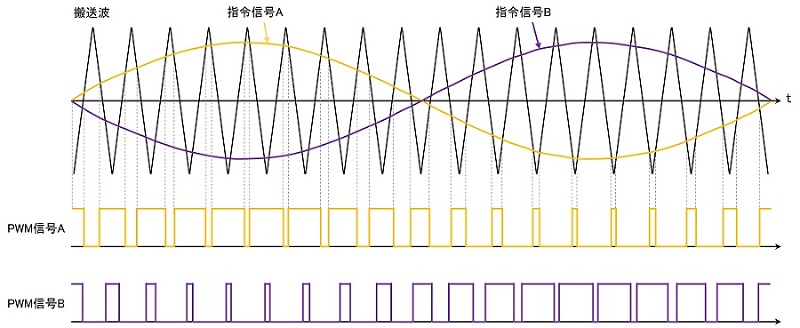
先ず、PWM信号A,Bの生成について説明します。指令信号A,BとPWM信号A,Bとの関係は図8となります。PWM信号Aは指令信号Aと搬送波の比較により生成されます。同様にPWM信号Bも生成されます。
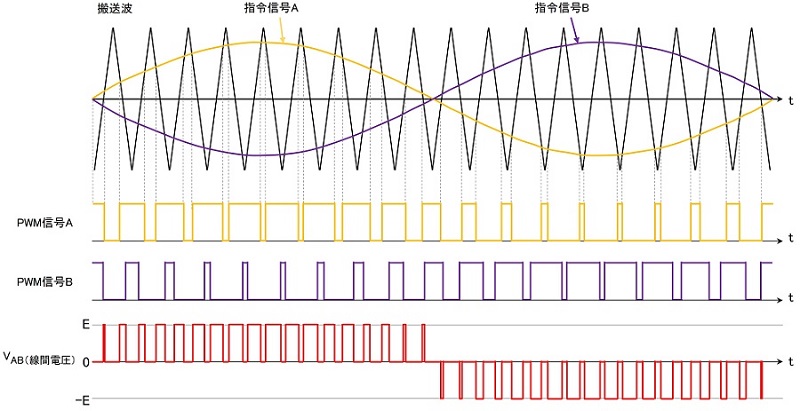
PWM信号A,Bと負荷(L)の線間電圧(VAB)を図9で示します。PWM制御信号A,Bにより、各アームが駆動されます。指令信号Aが指令信号Bよりも大きい時は負荷(L)の線間電圧は「+」となり指令信号と搬送波との関係でHi幅が変化します。指令信号Bが指令信号Aよりも大きい時は負荷(L)の線間電圧は「-」となります。その結果、負荷(L)に印可される電圧は交流となっていることが判ります。
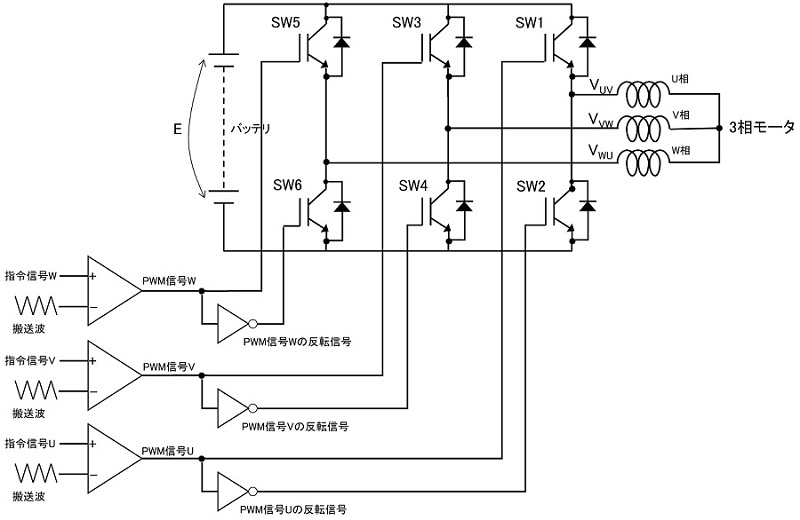
それでは、三相モータを駆動するインバータのPWM制御について解説します。図10はPWM制御の基本回路となります。三相モータを駆動するので、3つのレグを有しています。各アームへの駆動信号は、指令信号と搬送波との電圧を比較する比較器の出力から得られます。図10中の比較器Aの出力はレグ1のアーム1へ、反転させた信号をアーム2へ入力します。指令信号B、Cも同様な回路となります。
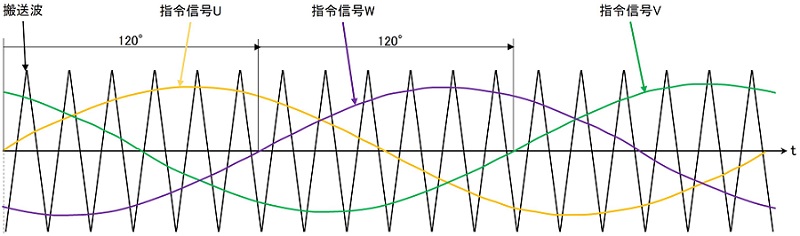
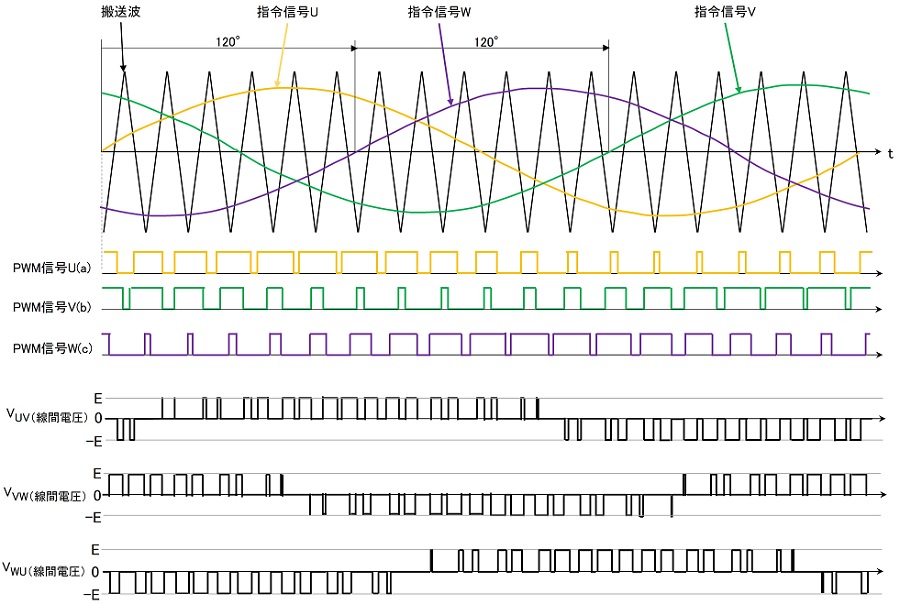
本稿の三相モータPWM制御では位相が120°ずれた3つの指令信号と搬送波とによりPWM信号を生成します。図11は三相の指令信号と搬送波との関係を示します。
各レグの出力(VU、VV、VW)と各モータ相の線間電圧(VUV、VVW、VWU)は図12となります。線間電圧VUVはレグ電圧VUとVVとの差となっています。指令信号Aが指令信号Bよりも大きい時、線間電圧は「プラス」となり逆の場合は「マイナス」となります。他の線間電圧も同様の動作となります。このことから、三相への印可電圧は交流となっていることが判ります。
2 DCDCコンバータ
DCDCコンバータとは直流(DC)を直流(DC)に変換する仕組みです。自動車の電源は12V(ガソリン車)や24V(ディーゼルエンジン車)でしたが、電動化により高圧電源が採用されました。電動車では高電圧バッテリから補器類などに12Vを供給するための低圧化が必要です。高電圧をさらに昇圧するシステムでも変換が必要です。なお、ECU内で使われるDCDCコンバータについては他の技術資料をご覧ください。
2(1) DCDCコンバータ(降圧型)
電動車では高電圧バッテリから補器類(各種ECUやヘッドライト、オーディオ)などの12V電圧を生成します。図13は降圧コンバータの回路構成例です。SWがオンするとコイル(L)にエネルギが蓄積されます。SWをオフにするとコイル(L)に蓄積されたエネルギを放出します。出力電圧は回路部品が理想値であるとすると、電源電圧×SWのオンオフ比率で計算できます。
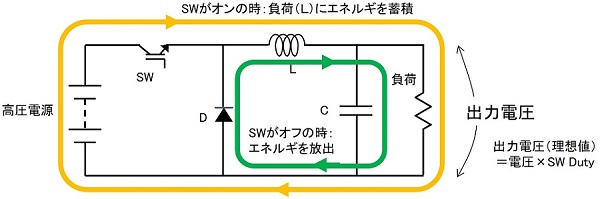
図14の方式はダイオード整流(非同期整流)と呼称されます。他の方式としてダイオードをSW素子に置き換え、二つのSWを同期させながら動作させる方式もあります。同期整流方式と呼称されます。変換効率はダイオード整流よりも高くなります。但し、ノイズの発生や回路部品の増加などのデメリットもあります。
2(2) DCDCコンバータ(昇圧型)
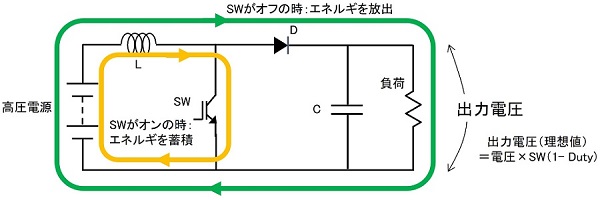
電動車では高電圧バッテリの電圧をさらに昇圧してトラクションモータを駆動する例があります。昇圧する目的は、モータの駆動電流を減らし、電気的な負荷容量を下げるためなどです。図14は昇圧コンバータの回路構成例です。降圧DCDCコンバータと同様な回路部品で構成できます。SWがオンの時、コイル(L)にエネルギを蓄積します。SWがオフするとコイル(L)のエネルギを放出します。出力電圧は回路部品が理想値であるとすると、電源電圧×(1-SWのオンオフ比率)で計算できます。
3 オンボートチャージャ(On Board Charger)
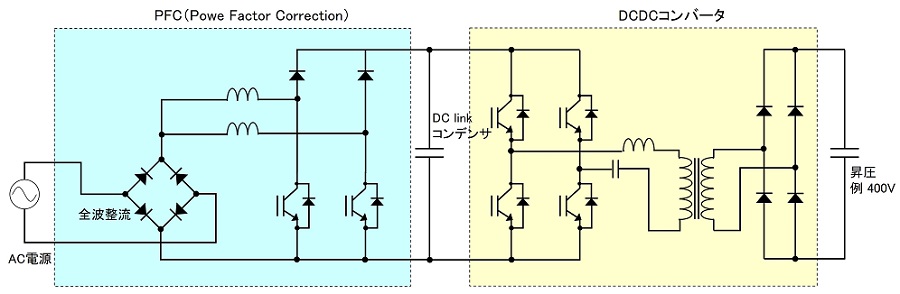
バッテリEVやPHEVでは車両の外部から高圧バッテリへ充電します。EVスタンドや家庭の交流電源から高圧バッテリへ充電する機能をオンボードチャージャと呼称されます。図15はオンボードチャージャの基本回路構成です。機能を大きく分けると2つあります。先ずAC電源を全波整流するダイオード整流回路がある、力率を改善するPFC(Power Factor Correction)部です。次は、PFCのDC出力をバッテリに充電するために必要な電圧へ昇圧するDCDCコンバータ部です。OBDの中には車両から商用電源へ伝送する双方向機能を備えています。災害時の電力ソースとして期待されます。最近の電動車では、高圧バッテリ容量のバリエーションが増え、また、充電時間を短縮するため高圧化の方向性が見られます。
インバータを構成する主要部品の技術
インバータ装置を構成する主要な部品について概説します。
1 パワー半導体
パワー半導体の主流はIGBT(Insulated Gate Bipolar Transistor)です。低圧系の電動車(60V以下)ではパワーMOSFETが使われています。トラクションインバータで求められる大電流、高耐圧など、半導体の特性に優れたSiC(Silicon Carbide 炭化ケイ素)が、今後有力視されています。なお、コンバータ用のパワー半導体ではIGBTの加えて、SiCやGaN(Gallium Nitride 窒化ガリウム)の採用も増えつつあります。各素子にはそれぞれの特徴(コスト、出力、動作周波数等)はありますが、今後の方向性として動作周波数と出力の観点ですみ分けられると想定されます。
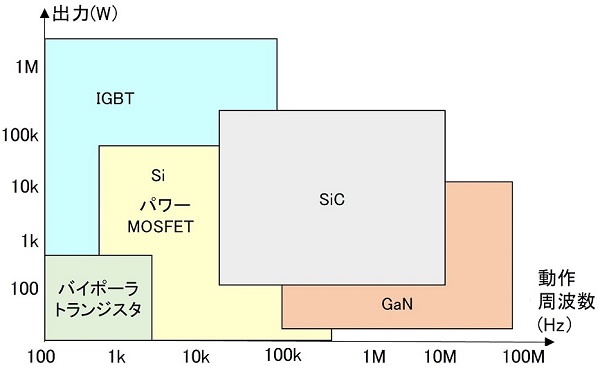
出典:各所の情報をもとに作成
2 ゲートドライバ
パワー半導体の性能を最大限に引き出すには、各パワー半導体のゲート制御が重要です。最近は個別の回路素子でゲートドライバを構成せずに、専用のICを採用することが主流となっています。それらのICにはゲートを制御する機能だけでなく、各種の保護機能や故障診断機能が含まれています。例えば、高電圧検出、加熱保護、高電圧保護、故障診断などがあります。
3 コンデンサ
コンデンサの役割は電圧変動を抑制することと電流変動を抑えることです。コンデンサがないと駆動回路がオン/オフ動作をする際に発生するパルス電流により、過大な電圧が発生します。この時の電圧がパワー半導体の電圧許容限界を超えると、半導体を破損させます。
4 モータ制御(ベクトル制御)
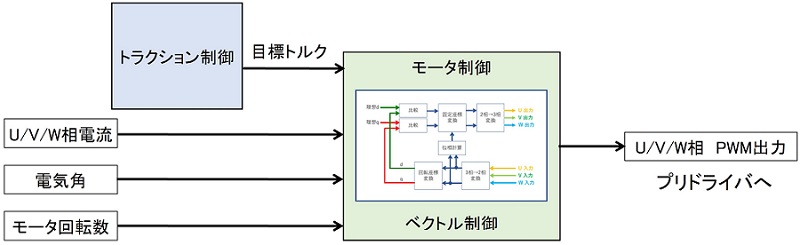
トラクションインバータのモータ制御としてベクトル制御が適用されています。モータに流れる電流のうち、トルクになる電流と回転子に磁界を発生させるための電流とに分けて、モータ電流をベクトル演算し制御する方法です。モータの特性に合わせて電流を流すので、誤差が少なく精度の良いモータ駆動を行うことが可能です。詳細は書籍等の技術資料を参照してください。図17はベクトル制御の基本構成です。
5 高電圧からの保護
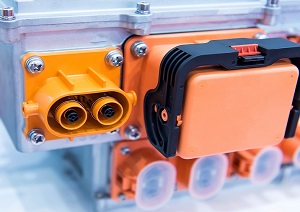
60V以上の高圧部を識別するため、オレンジ色のケーブルやコネクタが使用されます。インバータECUにおいては、簡易的な工具での分解を防ぐネジが採用されています。また、インバータのふたが外されると、コンデンサなどが放電される仕組みも具備されています。

6 電流センサ
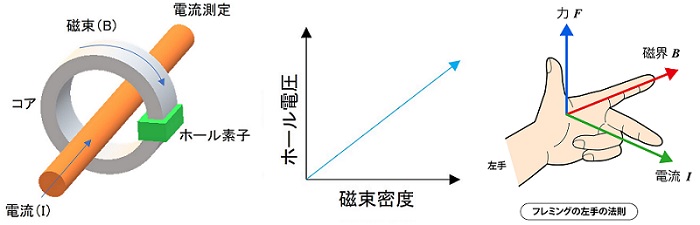
トラクションモータの出力を制御するため、モータに流れる電流を検出します。代表的な電流センサとして、ホール素子を使った方式が採用されています。ホール素子はホール効果(Hall Effect)と呼称される電流磁気効果を利用し、モータの電流によって生じる磁場に比例した電圧を出力します。図20は電流センサの基本構造です。フレミングの左手の法則となります。磁束密度とホール電圧は比例関係となるので、モータに流れる電流に応じた電圧を検出できます。
関連計測器の紹介

その他の製品や仕様については 計測器情報ページ から検索してください。
おわりに
電動車で採用されているインバータの技術は車両の動力性能に加えて電費に影響します。今後もパワー半導体の進化やコストダウン、小型化への対応が求められます。
自動車関連の他の記事は こちらから