自動車ECUのインタフェース~スイッチ信号から無線通信まで多岐にわたる技術を適用
自動車には数多くのECU※1が搭載されています。高級車では百個以上と言われています。各ECUに入出力されるセンサやアクチュエータも多くあり、今後も増え続けると推測されます。これらの入出力信号を処理するECUでは、色々なインタフェース※2で接続されます。ECUが導入された当初はオンオフの簡単な信号や電圧等のアナログ信号でしたが、搭載される機能や技術の進化に合わせて、信号の形式や速度が拡大してきました。
本稿では、車両システム全体を俯瞰し、各種センサからの信号をECUで処理するためのインタフェースについて概説します。インタフェースは信号の種類によって、オンオフ、アナログ、シリアル通信があります。特にシリアル通信についてはCAN、LINから最近のPSI5まで解説します。ECU内部で使われるSPIやI2C、情報系のLVDSも説明します。最後に車両システムの開発で使用される計測器の一例を紹介します。
《本稿の記述は、筆者の知見による解釈や、主観的な取り上げ方の面もあることをご容赦ください。また、本稿に記載されている技術情報は、当社および第三者の知的財産権他の権利に対する保証または実施権を許諾するものではありません。》
(Electronic Control Unit)車両システムを制御する装置、イーシーユーと呼称されます。
二つのものが接する部分。ECUで言えば、外部の信号をECU内部に取り込むための電気的な手段。
車両システムの全体像
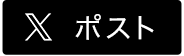
市販されている車両では図1を例として多くのシステムが搭載されています。システムを大きく分けると、エンジン制御などのパワートレイン制御系、電動パワーステアリング、ブレーキ制御などの車両制御系、エアバッグや周辺監視などのボディ制御系、ナビ、GPSなどの情報系になります。各システムで必要となる信号の例をまとめました (表1) 。物理量や化学物質を検出するセンサが扱われています。
| 対応領域 | パワートレイン制御系 | 車両制御系 | ボディー制御系 | 情報通信系 | ||
|---|---|---|---|---|---|---|
| システム例 |
・エンジン制御 ・電動車制御 |
・ABS ・車両姿勢制御 ・電動パワステ |
・オートエアコン ・エアバック ・衝突監視、制御 |
・ナビ ・ETC ・GPS |
||
| 物理量センサ | 力学的 | 長さ |
・ミリ波レーダ ・レーザレーダ |
・ソナー ・ミリ波レーダ ・レーザレーダ |
||
| 位置、角度 |
・スロットル開度 ・アクセル開度 |
・ステアリング角度 ・ステアリングトルク |
・HVAC角度 | |||
| 加速度 | ・加速度 |
・加速度 ・衝突検知 |
||||
| 振動 | ・ノック | ・加速度 | ・加速度 | |||
| 角速度 | ・ヨーレート | ・ジャイロ | ・ジャイロ | |||
| 圧力 |
・エンジン吸気圧 ・大気圧 ・燃料圧 |
・ブレーキ圧 |
・冷媒圧 ・タイヤ空気圧 |
|||
| 流量 | ・エアフローメータ | |||||
| 電磁気 | 位置、回転速度 |
・クランク角 ・カム角 ・回転数 |
・車輪速 ・車速 ・モータ回転角 |
・モータ回転角 | ・車速 | |
| 電流 | ・モータ電流 | ・モータ電流 | ・モータ電流 | |||
| 電波 | ・タイヤ圧センサ | ・キーレス |
・GPSアンテナ ・ETCアンテナ |
|||
| 光学的 | 光 | ・エンジン着火時期 | ・日射 | |||
| 温度 | 温度 |
・エンジン水温 ・吸気温度 ・俳ガス温度 ・モータ温度 |
・油温 |
・車室内 ・車室外 ・水温 ・油音 ・乗員 |
||
| 化学センサ | 化学的 | ガス濃度 |
・O2 ・A/F ・CO2 |
・CO ・湿度 |
||
インタフェースの基本
入力信号のインタフェースの方式を大きく分類すると、オンオフ信号、アナログ信号、シリアル通信です。それでは、各方式の原理について概説します。
1 オンオフ信号
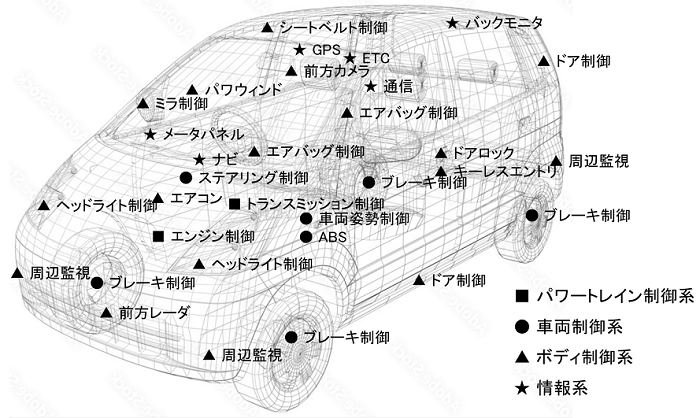
一般的にはスイッチの動作など二値を検出する信号です。マイクロコントローラのポートに接続され、「1」、「0」として処理されます。検出する精度や外来ノイズの影響を抑制するためにコンパレータ回路で閾値を設けて処理することもあります。また、任意の閾値をソフトウェアで設定するためにADC (アナログデジタルコンバータ) で取り込むこともあります。スイッチのチャタリングによる電圧波形の変動を平滑化するためにコンデンサが挿入されます。
2 アナログ信号
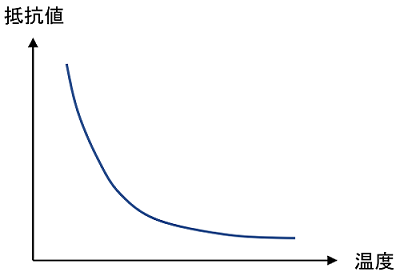
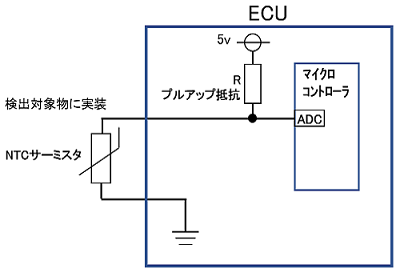
主に連続的な物理量を検出するセンサの出力信号となります。マイクロコントローラのADCで取り込みます。一例として、温度センサの回路を紹介します。温度センサはNTCサーミスタが一般的に使用されます。NTCサーミスタの特性は図3です。温度の上昇とともに抵抗値が小さくなる特性です。処理回路の例は図4です。ECU内にプルアップ抵抗が接続されることが一般的です。マイクロコントローラのADCでデジタル値に変換されます。
3 シリアル通信
デジタル処理された信号を送受信します。CAN、LINは車載システムで使用されるシリアル通信の代表です。各通信方式の概要は、本サイトの市場動向レポート「車載ネットワークの歴史と規格概要」を参照してください。
https://www.techeyesonline.com/tech-eyes/detail/TechnologyTrends-2011/
1)CAN
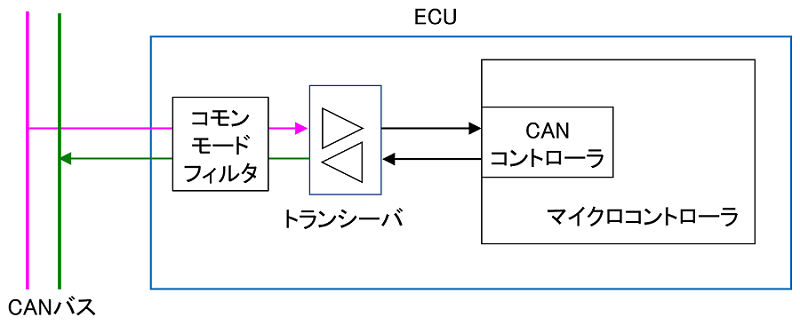
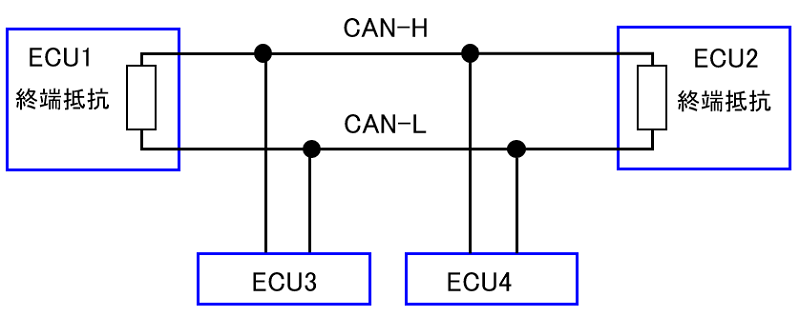
CANは2本のワイヤによる差動電圧方式です。回路構成例は図5です。CANコントローラ、トランシーバ、コモンモードフィルタで構成されます。コモンモードフィルタは規格で求められていませんが、EMI対策として実装されます。トランシーバはICメーカにより販売されています。CANコントローラはマイクロコントローラに内蔵されたものを使用することが一般的です。今後の仕様ですが、より高速化が図られます。CANに始まり、CAN FD (最高通信速度2Mbps)、CAN XL(10Mbps) へと進化します。
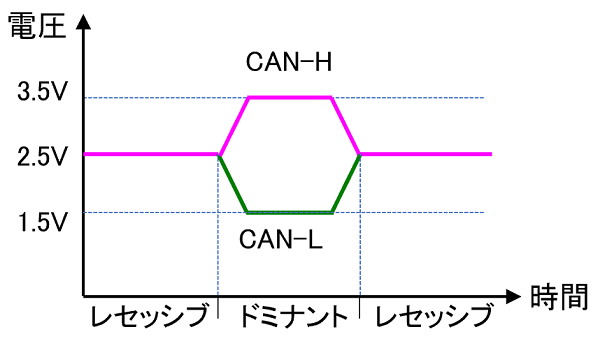
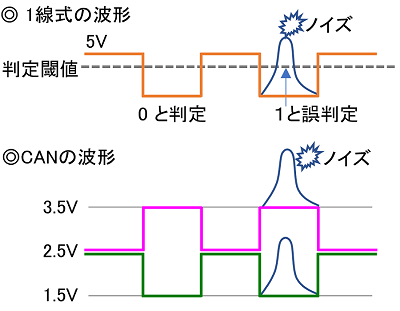
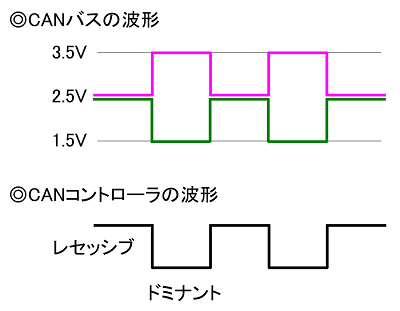
CANコントローラは信号の電位差によりレベルを判定します。レベルはドミナントレベルとレセッシブレベルがあります。必ず、どちらかのレベルとなります。高速CAN (ISO11898で規定) の電圧波形とレベルの関係は図6です。以下、高速CANをCANと称して記述します。
2本線の差動電圧方式なので、仮に各線にノイズが混入したとしても、各線の電圧はそれほど差がでないことから、ノイズの影響が抑えらます。図7に1本線と2本線との違いを示します。2本線の方がノイズの影響が少ないと理解できます。CANコントローラの入出力レベルは図8となります。
CANバスには多くのノードを接続し、高速で通信するため、バスとECU間のインピーダンスが整合されないと反射が発生し、通信に異常をきたすことがあります。そのため、CANバスの両方のエンドノードには、終端抵抗 (120Ω) が必要です。
2)LIN (Local Interconnect Network)
主としてボディ制御系など、通信の高速性が求められないシステムで採用されています。また、コストが抑えられることも特徴です。LINバスの長さは最長40mと規定されています。LINの電気的な基本構成はバッテリ電源とオープンコレクタのトランシーバとプルアップ抵抗 (終端抵抗) です。LINバスに接続されるマスタECUとスレーブECUの回路構成は図10の通りです。通信はマイクロコントローラに搭載されているUART (Universal Asynchronous Receiver/Transmitter) で行うことが一般的です。
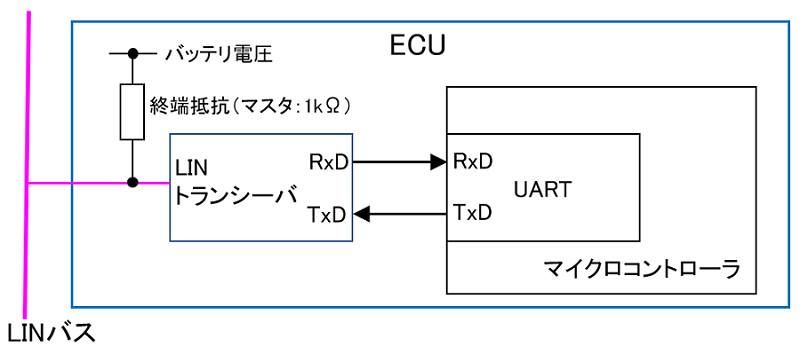
一般的にはマイクロコントローラとLINトランシーバを使用することでインタフェースを構成できます。専用のLINトランシーバICは各社から販売されています。LINインタフェースが内蔵されたマイクロコントローラも販売されています。マスタECUには1kΩの終端抵抗をバッテリ電源にプルアップします。スレーブECUの場合はLINトランシーバに終端抵抗30kΩが内蔵されているので、終端抵抗の実装は不要です。
3)SENT (Single Edge Nibble Transmission)
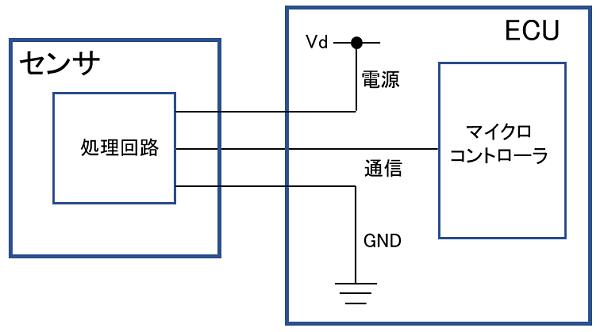
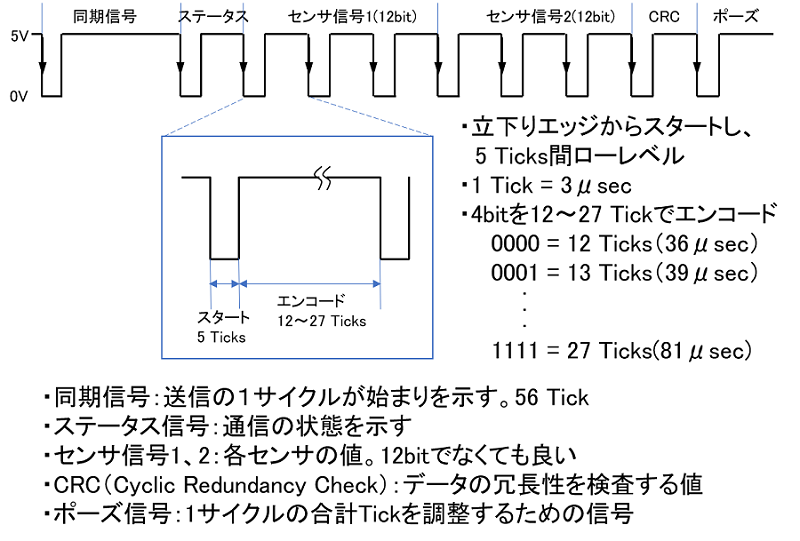
主に、電動パワステやエンジン制御用のセンサなど、高精度のアナログ信号を扱うセンサのインタフェースとして採用されています。SAE J2716で規定されています。前述のLIN通信に比べて通信速度が速いことが特徴です。LIN通信は20kbps、SENT通信は30kbpsです。センサとECUとをつなぐ一対一の送信専用通信です。このことも、バスを構成するLIN通信との違いです。信号線、電源、GNDの3線で構成できます。SENT通信の構成は図11です。電圧の立下りエッジ間の時間で信号の内容を判断します。信号の構成を図12に示します。信号を4bit単位で送信します(※3)。
4bitをNibble(ニブル)という。
4)PSI5 (Peripheral Sensor Interface 5)
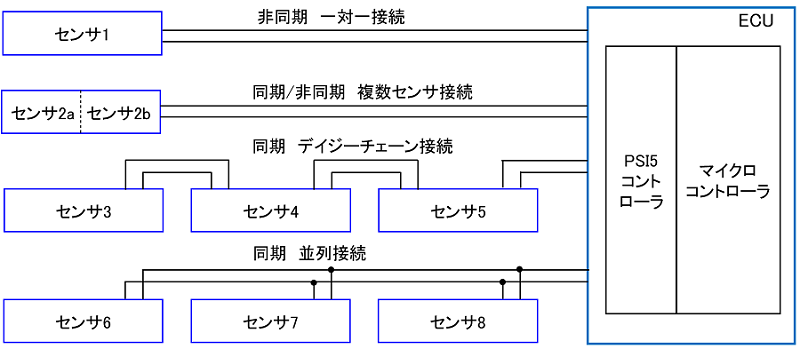
PSI5は主として、エアバッグおよび関連するシステム用のセンサ通信バスとして使用されてきましたが、その他のシステムでも適用されることを想定しています。オープン規格としてPSI5の組織が標準化の活動を推進しています。参加メンバはTier1サプライヤ、半導体サプライヤなど20社近くです。日本の企業として、デンソー、ルネサス、TDKが参加しています(2021年5月27日時点)。実装に関するライセンス料は無料です。インタフェースの特徴はツイストペア2線、電流変調式です。電流変調方式はEMI (Electromagnetic Interference電磁障害) に強いと言われています。
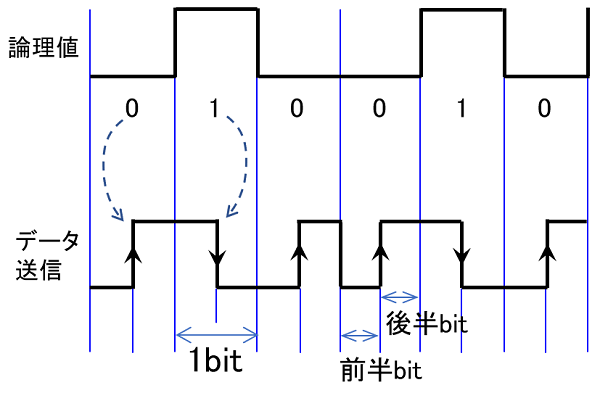
データ送信はマンチェスタ符号が使用されます。1bitの論理値「0」を送る場合は立ち上がり信号で、論理値「1」を送る場合は立ち下がり信号で示されます。送信波形の概要は図13です。なお、受信側は信号をオーバーサンプリングすることで、伝送線の異常を検知することが可能です。1bitの前半と後半のレベルが「0」「0」、「1」「1」であれば、伝送ラインの異常と判定できます。PSI5の接続例は図14です。色々な接続構成が定義されています。一対一接続、複数センサが共存したセンサの接続、デイジーチェイン接続、並列接続です。
エアバッグシステム関連のインタフェースとして、DSI (Distributed Systems Interface) があります。デンソー、TRW (現 ZF)、NXP、Elmos (遅れて参画) が標準化を推進しています。技術仕様はDSI Consortiumのホームページを参照してください。
5)ECU内の通信で使用されるインタフェース (SPIとI2C)
ECU内のIC間をシリアル通信によるデータの送信や受信をすることがありますが、その際に適用されるインタフェースの例を紹介します。
SPI (Serial Peripheral Interface)
旧モトローラ (現NXP) が提唱した規格です。一個のマスタと複数のスレーブを構成できます。図15に構成例を示します。
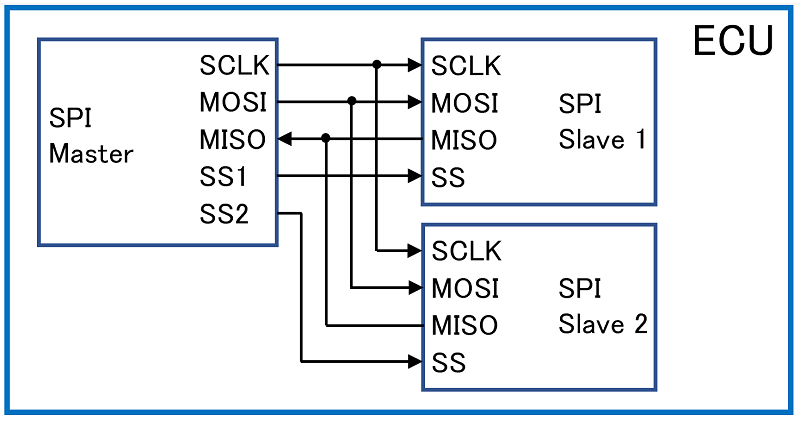
信号線は4本で構成されます。各信号の機能は以下の通りです。
SCK:通信するためのクロック
MOSI:マスタが送出しスレーブが受信するデータライン
MISO:スレーブが送出しマスタが受信するデータライン
CS:スレーブをアクティブにする選択信号
SPI通信用のICやSPIのコントローラが内蔵されたマイクロコントローラが販売されています。詳細な技術情報は各情報源等を参照してください。自動車用の規格として活動している団体があります。
Safe SPI:https://safespi.org
日本のメーカでは村田製作所とパナソニックがメンバとして参加しています (2021年5月21日時点)
I2C (Inter-Integrated Circuit)
旧フィリップス (現NXP) が提唱した規格です。通称「アイ・ツー・シー」です。1個のマスタと複数のスレーブを構成できます。図16に構成例を示します。
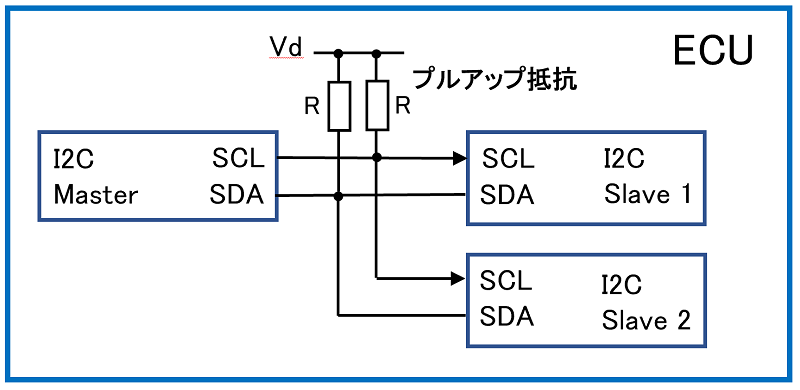
信号線は2本で構成されます。各信号は電源に抵抗でプルアップされたオープンコレクタで実現できます。各信号の機能は以下の通りです。最大112個のスレーブを接続できます。
SCL:通信するためのクロック
SDA:通信するためのデータライン
I2C用のICやI2Cのインタフェースが内蔵されたマイクロコントローラが販売されています。詳細な情報は各種の技術資料等を参照してください。
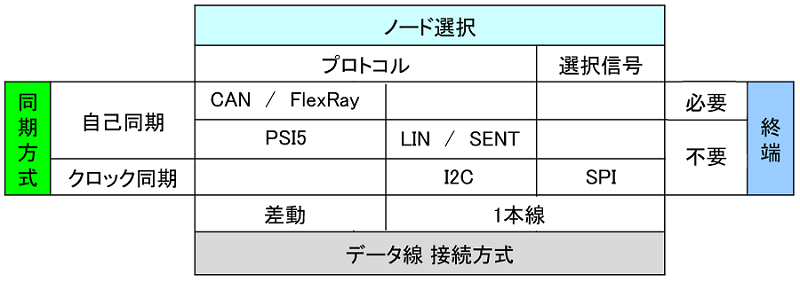
これまで説明したシリアル通信について、基本的な要件 (同期方式、ノードの選択、伝送モード、終端) でまとめると表2となります。