モータ ~ いまや産業のコメ
「モータ(motor)」は一般的には電気モータのことを「motor」と捉えられますが、電気や燃料をエネルギ源として、回転運動や往復運動に変換する機構の総称です。端的に言えば、「原動機」となります。オートバイや自動車は動力源として内燃機関が使用されるので、例えば「motor race」のことを「自動車レース」と訳されます。近年の自動車では多くのモータが使用されています。また、カーボンニュートラルに対応するため、電動化が進展しつつあり使用されるモータは増加の一途です。一般的な内燃機関の熱効率は40%前後ですが、モータの効率は80%を超えます。各所の情報によると車両一台当たり100個以上のモータが使用される例もあります。
本稿では「電気モータ」に絞った情報を紹介します。まず、モータの歴史、モータの基本原理を述べます。モータの基礎となったアンペール、ビオ/サバール、アラゴ、ファラデー、レンツ、フレミングなどの発見・発明を概説します。また、車載用のモータ事例を紹介します。その後に、モータの分類や特徴、モータに関連した技術や制度を解説します。前段で説明した発見・発明が現在の各種モータ(永久磁石界磁型モータ、誘導モータ、ユニバーサルモータ、ステッピングモータなど)に使われていることを図解します。さらに、モータに関連した要素技術を述べます。最後にモータの技術に関連した計測器を紹介します。
《本稿の記述は、筆者の知見による解釈や、主観的な取り上げ方の面もあることをご容赦ください。また、記載されている技術情報は、当社および第三者の知的財産権他の権利に対する保証または実施権を許諾するものではありません。》
モータの歴史
「電気モータ」の分類や特徴は後ほど解説しますが、電気モータを動作原理で大きく分類すると、電気磁気の作用で動作するかどうかとなります。モータの歴史を語る上で、基本原理である電気と磁気との作用による「電磁気」がポイントです。表1に「電磁気」に関連する発見や発明をまとめました。以降、関連する代表的な発見や発明を紹介します。
| 年 | 発見・発明の概要 | 人名 | 国名 |
|---|---|---|---|
| 1820 | 導線に電流を流すと、近くに置いた方位磁石の磁針が振れる | ハンス・クリティアン・エルステッド | デンマーク |
| 1820 | 電流を流した2本の導線間に力が生じること。導線の周囲にできる円状の磁界「右ネジの法則」 | アンドレ-マリ・アンペール | フランス |
| 1820 | コイル(検流計の原型) | ヨハン・ソロモン・クリストフ・シュヴァイガー | ドイツ |
| 1820 | 電流と磁界の大きさの関係「ビオ・サバールの法則」 | ジャン‐バティスト・ビオ/フェリックス・サバール | フランス |
| 1820 | 電流を流した導線の近くに置いた鉄が磁石になる | ジョセフ・ルイス・ゲイ‐リュサック | フランス |
| 1820 | 電磁石 | ドミニク・フランソワ・ジャン・アラゴ | フランス |
| 1820 | 電磁作用を利用した回転装置 | ウイリアム・ハイド・ウォラストン | イギリス |
| 1821 | 電磁気による回転モータ | マイケル・ファラデー | イギリス |
| 1822 | 電流を流した2本の導線間に働く力の大きさを数式化 | アンドレ-マリ・アンペール | フランス |
| 1823 | 実用的な電磁石 | ウイリアム・スタージャン | イギリス |
| 1824 | 磁石の動きで円板が回転する「アラゴの円板」の原理 | ドミニク・フランソワ・ジャン・アラゴ | フランス |
| 1831 | ファラデーの電磁誘導の法則 | マイケル・ファラデー | イギリス |
| 1834 | 誘導電流が磁石の動きを妨げる方向に流れる「レンツの法則」 | ハインリッヒ・フリードリッヒ・エミリ・レンツ | ロシア |
| 1834 | ブラシモータ | モリッツ・ヤコビ | ロシア |
| 1836 | 実用的な直流ブラシモータ | トーマス・ダベンポート | アメリカ |
| 1882 | 二相交流モータの原理 | 二コラ・テスラ | フランス |
| 1885 | 「フレミングの法則」(右手の法則、左手の法則) | ジョン・アンブローズ・フレミング | イギリス |
| 1888 | 単相交流モータ | 二コラ・テスラ | アメリカ |
発見・発明年は諸説あり。国名は発見・発明時の居所。
1 エルステッドの「電流の磁気作用」
1820年にコペンハーゲン大学(デンマーク)の物理学者 ハンス・クリスティアン・エルステッドがボルタの電池※1を使った公開実験を行っている時、導線に電流を流すと、方位磁石の磁針が振れることを見つけ、論文に発表しました。論文はラテン語でわずか4ページです。原文の複写版を著名な図書館のサイトで閲覧できます。論文名は「experimenta circa effectum conflictus electrici in acum magneticam」です。図1は磁気作用の概要です。エルステッドの論文が発表されてから、一挙に電気磁気に関する発見や発明が続きました。
2021年4月公開:「電池の進化~EV化のキーパーツ」をご覧ください。
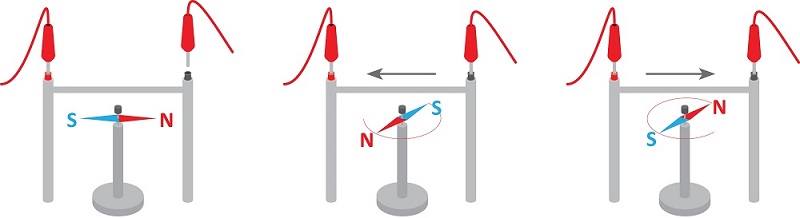
2 アンペールの「右ネジの法則」
1820年にアンペールはエルステッドの「電流の磁気作用」が発表されてから直ぐ、電流と磁針との関係を見出しました。そして、数式化しました。当時、アンペールは数学者として教鞭を執っていました。導線に電流が流れると磁界が生じ、電流と磁界との間に法則がなりたちます。この法則を「アンペールの法則」と呼称されます。「磁界の中に閉曲線をとり、この閉曲線上で磁界Hの大きさを積算すると、この値は閉曲線を貫いて流れる全電流に等しい」となります。電流の中心から半径rの円を考えると、閉曲線上の磁界Hの積算量は2πrHとなります。つまり、I(電流)=2πr(半径)H(磁界)です。「アンペールの右ネジの法則」はこの法則の一部です。
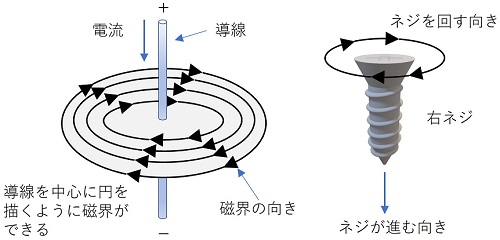
3 ビオ・サバールの法則
1820年にビオとサバールは導体を流れる電流の強さと導体の微小部分が作る磁界の強さに法則があることを発見しました。導線に電流I(A)が流れている時、導線の微小部分Δd(m)によって生じるP点の磁界の強さΔHを数式化しました。
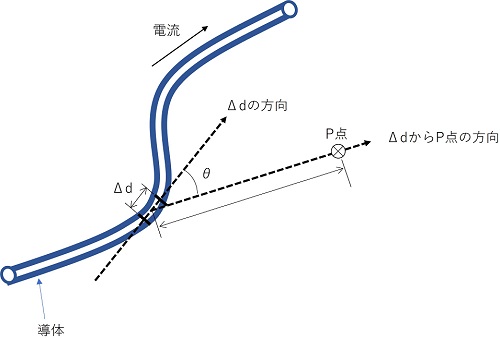
なお、ビオ・サバールの法則とアンペールの法則は、数式の観点では同等となります。
4 電磁石の発見
1820年にジョセフ・ルイス・ゲイ‐リュサックが導線の近くに置いた鉄が磁化されることを発見しました。同年にドミニク・フランソワ・ジャン・アラゴは鉄心にコイルを巻いて電流を流すと、コイルだけの時よりも強い磁界が発生することを発見しました。これが、電磁石の始まりとされています。
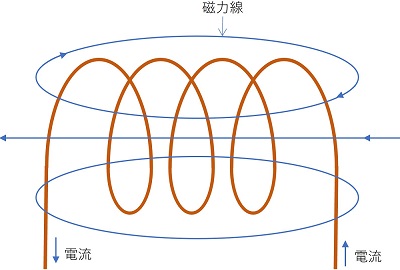
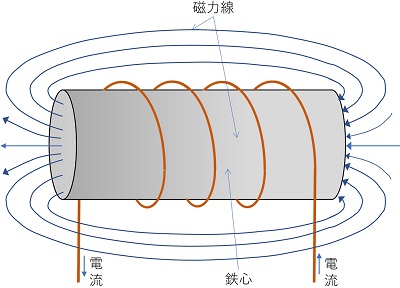
なお、1823年にウイリアム・スタージャンが実用的な電磁石を考案しました。図6はスタージャンが考案した電磁石のイメージです。馬蹄形の鉄に導線を巻き付けた構造です。
(イメージ)

5 アンペール力
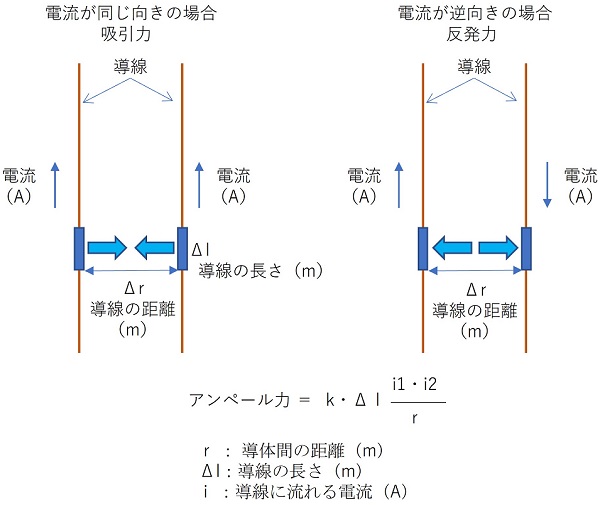
1822年にアンペールは2本の導線を並べ、電流を流すと力が作用することを確認し、数式化しました。この力をアンペール力と言います。図7はアンペール力の概念です。電流を同じ向きに流すと吸引力が、逆向きに流すと反発力が作用します。力は電流の大きさに比例し、導体間の距離に反比例します。アンペール力の式に磁界は現れませんが、電磁力(ローレンツ力)が作用しています。電磁力は磁界と電流との相互作用で発生する力です。
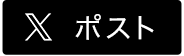
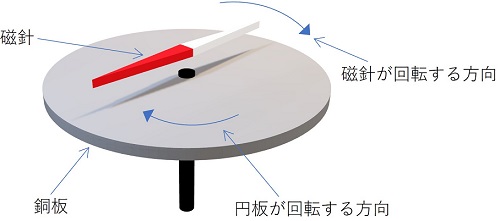
6 アラゴの円板
電磁石を発明したアラゴは、1824年に「アラゴの円板」と呼称される電気磁気現象を発見しました。発見した経緯は諸説あるようです。方位磁石を銅板の上において銅板を回転させると、磁針が引きずれれるように同じ方向に回り、磁針を回転させると銅板が同じ方向に回ります。図8はアラゴの円板を表すイメージです。発見した当時、現象の説明はなされていませんが、現在の誘導モータ(後ほど解説)の原理モデルと言われています。この現象を法則化したのは、後のファラデーです。
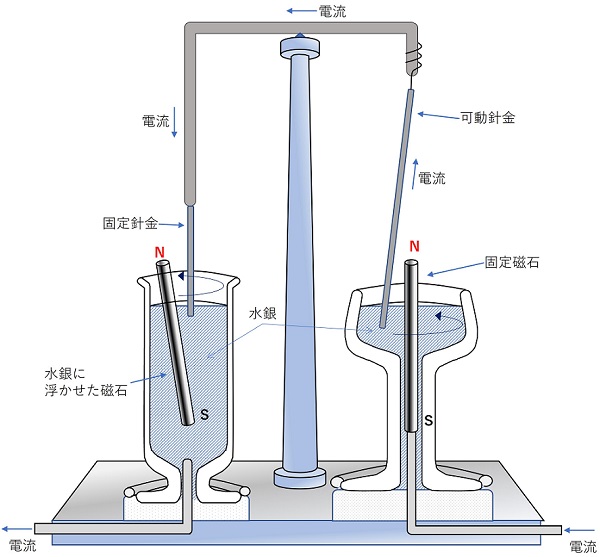
7 ファラデーモータ
1821年にファラデーは電磁モータの原型と言える回転装置を発案しました。これは「ファラデーモータ」と呼称されています。水銀を満たした二つの容器の片方の容器に導体から針金を立て、もう一方の容器には導体から吊るした針金を水銀に浸し、電流を流すと水銀に浮かべた磁石と可動針金が回転します。図9はファラデーモータの実験イメージです。
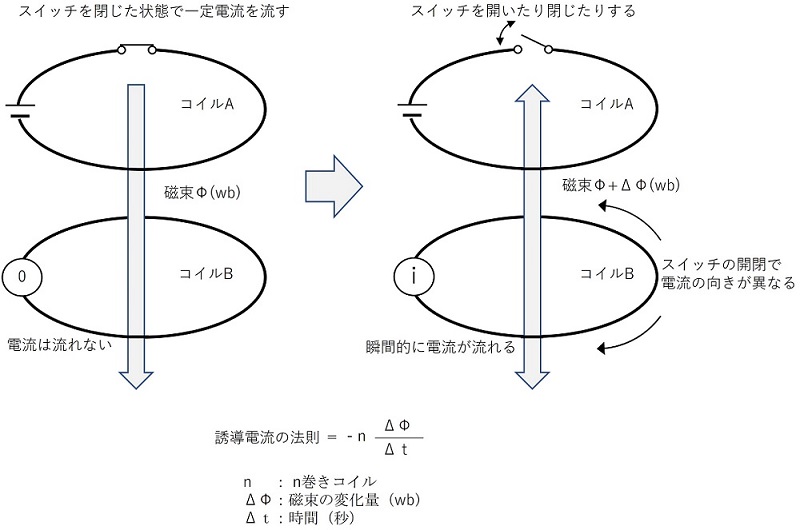
8 ファラデーの電磁誘導の法則
1831年にファラデーは電磁誘導電力がループコイルを貫通する磁束(磁力線の量)の時間変化とコイルの巻き数に比例することを発見しました。図10は電磁誘導のイメージです。コイルAに定常電流が流れている時、コイルBに電流は流れません。スイッチを開閉した瞬間に電流が流れます。スイッチの開閉で電流の向きは異なります。
9 レンツの法則
1834年にレンツによって発見されました。電磁誘導によって生じる誘導起電力の向きを示すことです。誘導電流の向きは、磁束の変化を妨げる向きとなります。図11はレンツの法則のイメージです。
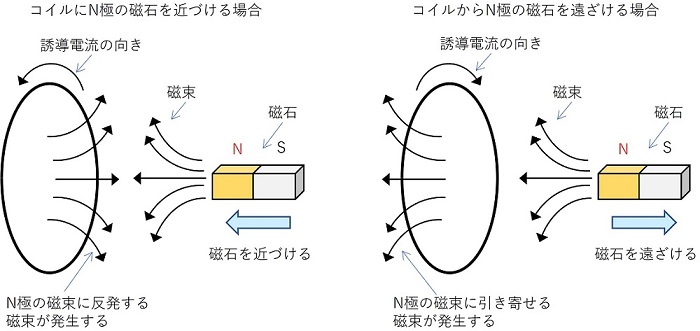
流れる電流の向きは、「右ネジの法則」となります。誘導起電力の大きさは、「ファラデーの電磁誘導の法則」で求めることができます。
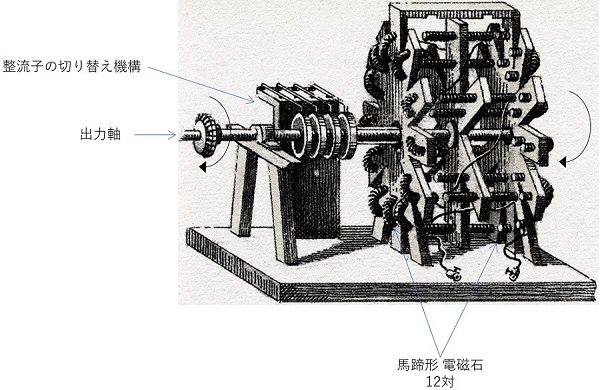
10 整流子モータ
1834年にヤコビは整流子モータを発明しました。4つの馬蹄形電磁石を固定子と回転子に配置し、極の切り替えを水銀ポットに浸した4本のレバーで行う構造です。電源はガルバニ電池※2です。図12は1838年に製造された「ヤコビモータ」の改良版です。このモータを動力とした外輪船に搭載され乗客を運びました。
2021年4月公開:「電池の進化~EV化のキーパーツ」をご覧ください。
11 二相交流モータ
1882年にテスラが二相交流モータの原理を発案しました。テスラのエピソードとして有名なことは、エジソンとの直流交流論争です。電源の生い立ちは直流の電池でした。当時のモータは直流なので交流を直流に変換して電力として供給されていました。エジソンは市中に送電する計画を直流で行おうとしました。自身が発明した電球を点灯させるためには直流が良かったのです。また、直流は蓄電できます。しかしながらテスラは直流送電の反対論者でした。送電を長距離化するためには、損失を減らす高電圧化が有利となります。高電圧化で電流が下がるからです。また、交流は変圧器で昇圧化、降圧化が簡単に行えます。この論争は両者の電力事業まで続きましたが、結果はテスラに軍配があがり交流送電となりました。
12 フレミングの法則
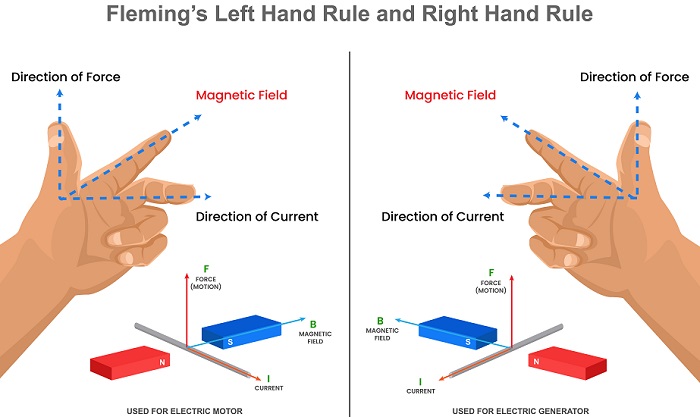
電磁モータは永久磁石と電磁石もしくは電磁石同士の間で発生する力によってモータは回転します。この力は「ローレンツ力」です。ローレンツ力は電流の向きと磁界の向きに対して直角の向きに作用します。この事象を1885年にフレミングが発見しました。左手の親指・中指・人差し指をそれぞれが直角になるように立て、人差し指を磁界の向き、中指を電流が流れる向きに合わせると、親指が示す方向にローレンツ力が作用します。これを「フレミングの左手の法則」と呼称します。電磁モータが回転する基本的な原理です。一方、磁界の中で導線を移動させると誘導電流が流れます。この事象を右手に当てはめることが可能であることを発見しました。右手の人差し指を磁界の向き、親指を導線が移動する向きに合わせると、中指は誘導電流が流れる向きとなります。これを「フレミングの右手の法則」と言います。電磁モータを外部の力で回転させると電流が流れるので、電磁モータは発電機になります。
モータの市場
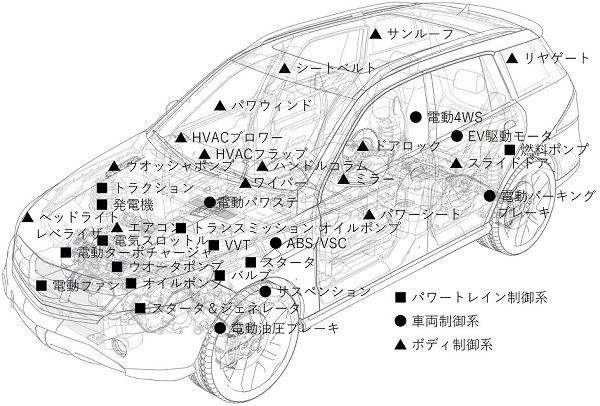
車両に搭載されているモータの数は小型車で50~100個、高級車では150個近くあり、多くのモータが使用されています。各所の情報によると、世界中の自動車に搭載されたモータは2020年時点で30億個以上あるとされています。今後もカーボンニュートラルに向けて、電動化されるシステムが増加するので搭載される数量は続伸すると推測されます。図14は車載用モータの適用例です。エンジン車や電動車のパワートレイン系だけでなく、車両制御やボディ制御用として、車両のエレクトロニクスシステム全般で適用されていることが分ります。
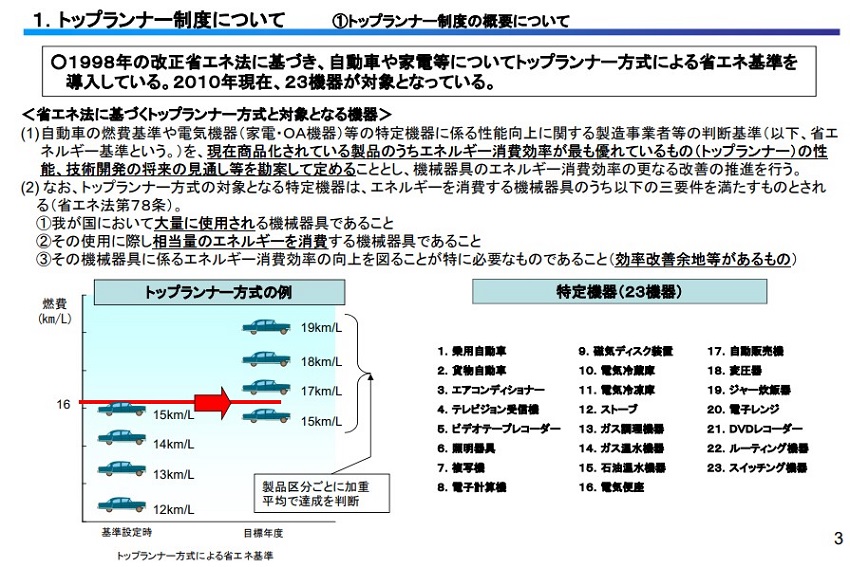
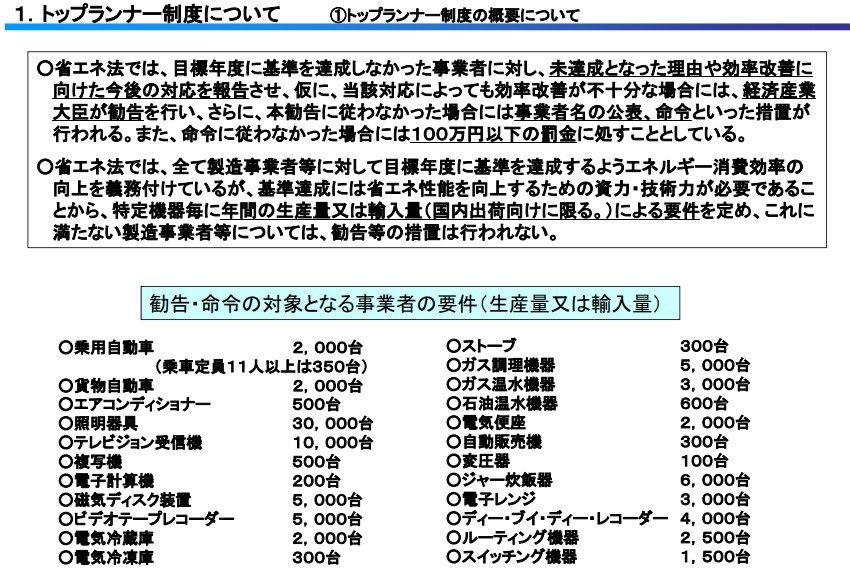
モータに関連した制度が運用されています。経済産業省により「1998年の改正省エネ法に基づき、自動車や家電等についてトップランナー方式による省エネ基準」を導入しています。製造業者等が達成しなければならない機器の「エネルギー消費効率」に関する目標基準値を定めています。いわゆる「トップランナー方式」という考え方に基づいて、エネルギー消費効率が最も優れている製品の値を基本として目標基準値が決定されます。2010年現在、23機器が対象となっています。図15、図16はトップランナー制度の概要です。
出典:経済産業省
出典:経済産業省
モータの分類と特徴
1 モータの基本構成
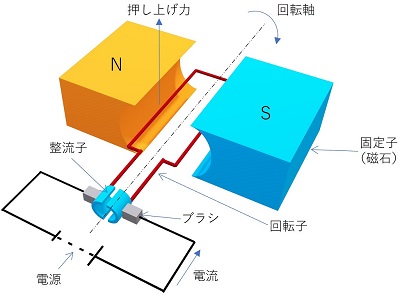
モータの基本構成について、永久磁石界磁型モータを例に解説します。図17は永久磁石界磁型モータの基本構成です。N極とS極の間に整流子に接続された回転子が設けられ、整流子に電力を供給するブラシで構成されています。
- 界磁:磁界を発生させる磁石です。電磁石によるモータの種類もあります。
- 電機子(armature:アーマチャ):界磁に対して回転する部分です。直流ブラシモータでは、電機子と回転子は同一視です。
- 回転子(rotor:ロータ):モータの回転する部分です。電機子、シャフト、整流子を合わせた総称です。
- 固定子(stator:ステータ):固定されている部分です。界磁を生成します。電磁石によるモータもあります。
- 整流子(commutator:コミュテータ):回転子がブラシに接する部分で、電流の向きを切り替えます。
- ブラシ(brush):整流子と接触、非接触を繰り返します。
2 モータの分類
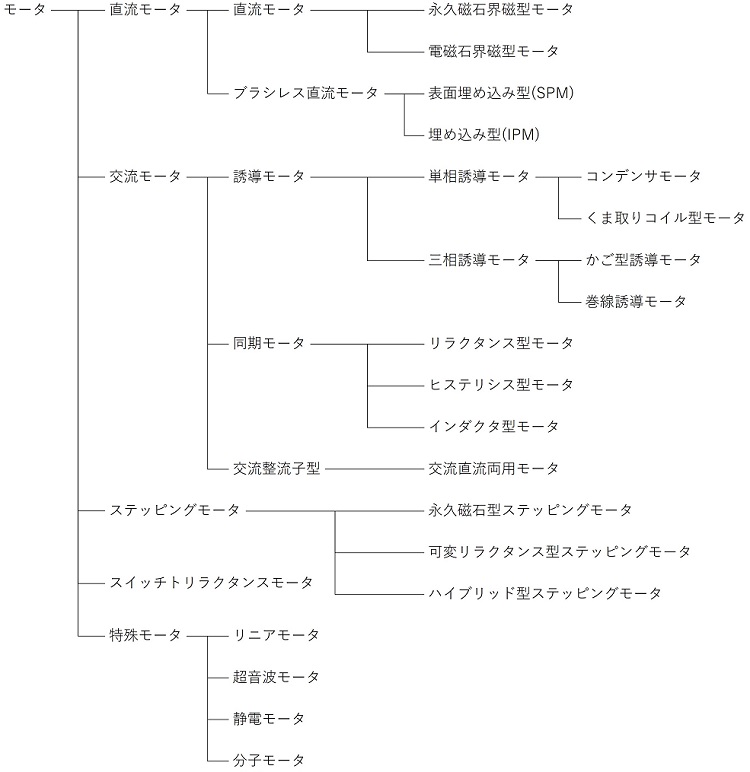
モータには多くの種類があります。構造や原理などで一意的に分類することは難しいです。例えば、モータに供給する電源が直流か交流かの違いがあっても、基本構造が似通っているなどがあります。一般的な分類の観点として、1)回転原理(電磁モータ、静電モータ、超音波モータ)、2)電源(直流、交流)、3)内部構造などがあります。本稿では電源の種類と回転原理の観点を基本として分類します。図18はモータを大分類した構成です。
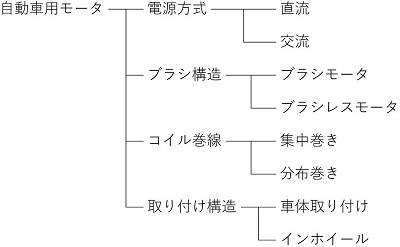
車載で使用されているモータを別の観点で分類すると図19となります。
電動車の駆動用として採用されているモータの種類は図20(青字)です。主流はブラシレス直流モータです。
3 モータの構造と動作原理
主要なモータの構造と特徴を概説します。
1)永久磁石界磁型モータ、電磁石界磁型モータ
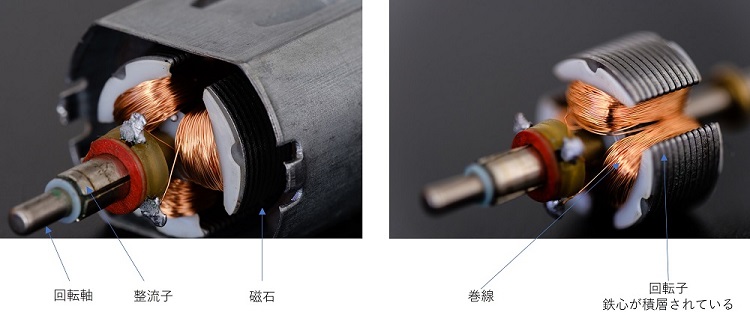
直流モータに分類され、もっとも普及しているのが直流ブラシモータです。界磁が永久磁石か電磁石かで分類されます。図21は永久磁石界磁型モータの構造です。回転子の鉄心が積層されている理由は、渦電流による損失を抑えるためです。動作原理は前述の図17永久磁石界磁型モータの基本原理を参照してください。
永久磁石界磁型モータの界磁を永久磁石から電磁石へ置き換えた構造が電磁石界磁型モータとなります。動作原理は永久磁石界磁型モータと同じです。図22は電磁石界磁型モータの例です。
2)ブラシレス直流モータ
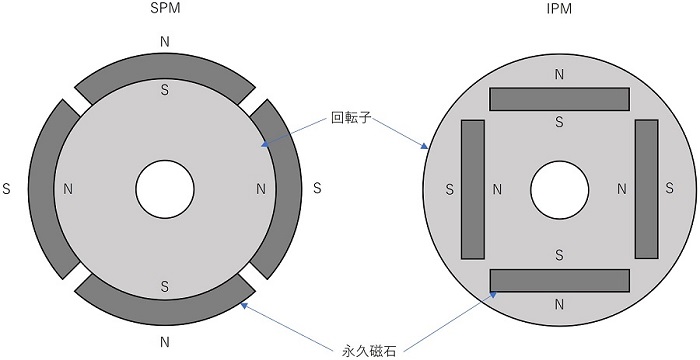
印可する電源の観点で直流モータに区分しましたが、コイルに流れる電流は双方向なので交流モータに区分されることもあります。回転子が永久磁石で固定子はコイルです。永久磁石の配置により、コイルの外側に配置されるアウターロータ形、コイルの内側に配置されるインナーロータ形、ハードディスクなどで採用されている平面の回転子に磁石を配置したアキシャルギャップ形などがあります。なお、回転子に配置する磁石の位置による違いがあります。回転子の外側表面に磁石を配置した表面磁石型(SPM:Surface Permanent Magnet)と回転子の内側に磁石を配置した埋め込み磁石型(IPM:Interior Permanent Magnet)があります。SPMでは回転子の外側に磁石を張り付けるので、磁力を有効に活用でき、トルクが大きくなります。高回転時の遠心力によって磁石がはがれるリスクがあります。埋め込み磁石型は、磁力が弱くなりがちですが、リラクタンストルク(磁気的な回転力)を活用できます。電動車の駆動用モータではSPMが採用されています。図23はSPMとIPMとの構造比較です。
3)誘導モータ
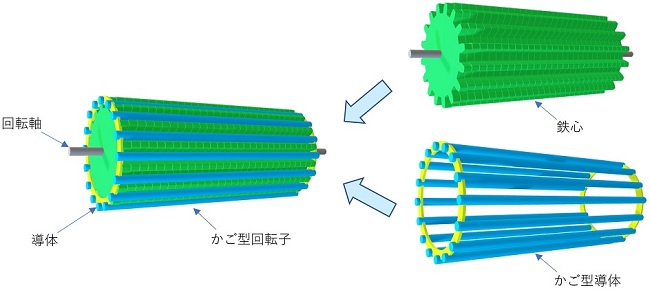
誘導モータは固定子が磁界を回転方向へ生成することで、回転子に作用し動作させます。回転する磁界のことを回転磁界と称します。回転子が回転する原理は「アラゴの円板」となります。そのため、誘導モータの特徴は回転子が回転磁界と同じ速度で回転できないことです。同じ速度で回転すると、電磁誘導は発生しないので、回転力となるローレンツ力も生じません。回転磁界と回転子との速度差を「すべり」と言います。モータを分類する一つの観点として、非同期モータとなります。前述した「アラゴの円板」の動作説明では磁石を回転させましたが、コイルに3相交流を流して回転磁界を生成するモータは三相誘導モータとなります。テスラ社の初代モデルSで採用されました。前述の分類では、「かご型誘導モータ」となります。回転子を構成する導体にアルミや銅製のかごのような形状となっています。導体に誘導電流が流れ、「フレミングの左手の法則」によって回転子が回ります。図24は誘導モータの代表例である「かご型誘導モータ」の回転子です。
4)交流同期式リラクタンス型モータ
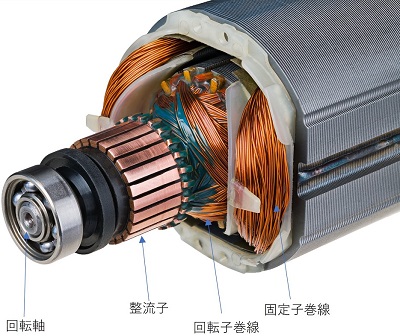
交流巻線型同期モータは固定子と回転子に電磁石を使用します。回転子の給電はブラシで行います。ブラシと接する回転子側は整流子の代わりにスリップリングを使用します。直流ブラシモータの整流子のように電流の向きを変えません。永久磁石を回転子とするブラシレス直流モータのような逆起電力による性能低下を抑制する界磁制御が行えるので、高回転まで特性を維持することが可能です。日産 アリアで採用されました。巻線界磁式同期モータと呼称されることもあります。
5)ユニバーサルモータ
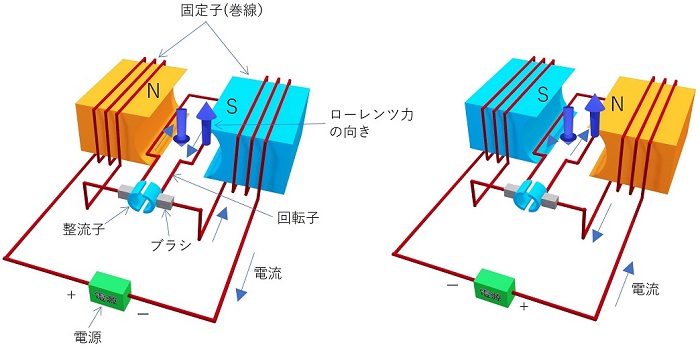
ユニバーサルモータは交流でも直流でも動作する整流子モータです。交流整流子モータに分類されます。固定子コイルと回転子コイルに同じ電力を供給します。直流でも交流でも回転方向は同じで出力特性は同等となり、高速回転です。主な用途は家庭用掃除機、ジューサ、電動工具などです。図25はユニバーサルモータの動作原理です。図25 左側のように電流が流れると固定子の巻線で生成する磁界中に回転子の電流がローレンツ力を受けます。その向きは「フレミングの左手の法則」により回転子の右側は上向き、左側は下向きに回転します。図25の右側は電源の極性が切り替わった状態です。固定子に生成される磁界は逆転しますが、電流の向きも逆転するので、「フレミングの左手の法則」によるローレンツ力の向きは変わらないので、回転する方向も同一となります。
6)ステッピングモータ
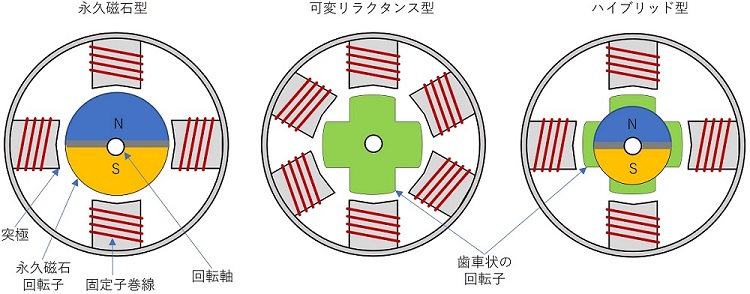
ステッピングモータは直流の駆動パルス信号に同期して回転するモータです。固定子のコイルを順番に駆動して回転磁界を生成します。回転子は固定子の磁界に応じて吸引と反発を繰り返して動作します。動作させるためには駆動回路が必要になります。特徴的なことは、連続的に回転するのではなく、一定の角度ずつ回転することです。そのため、所定の条件下では、回転する速度や角度の制御をオープンループで行えます。自動車のスロットルバルブ制御などに適用されています。ステッピングモータを分類する観点として、回転子の構造でとらえると、①永久磁石型、②可変リラクタンス型、③ハイブリッド型となります。図26は各ステッピングモータの構造イメージです。
- ①永久磁石型:回転子に永久磁石を使用します。
- ②可変リラクタンス型:回転子に歯車状の積層鉄心を使用します。
- ③ハイブリッド型:回転子に永久磁石と歯車状の鉄心を使用します。
7)スイッチトリラクタンスモータ
可変リラクタンス型ステッピングモータと同様な構造ですが、オープンループの制御ではなく、高速に回転させるため、回転子の位置をセンサで検出してフィードバック制御を行います。一般的にSRモータと呼称されます。掃除機などの適用例があります。また、電動車の駆動用モータとしての適用も検討されています。永久磁石を使用しないことから有望視されていますが、振動や騒音が大きいなどのデメリットがあります。
8)特殊なモータ
①リニアモータ
リニアモータは回転運動ではなく直線運動するモータです。回転するモータと同様に電磁作用で動作します。回転式モータでは、磁界が回転しますが、リニアモータでは直線状の磁界となります。リニアモータの基本構造は 2023年1月公開:「鉄道の技術 ~ モータリゼーションの進化に対応」をご覧ください。
②超音波モータ
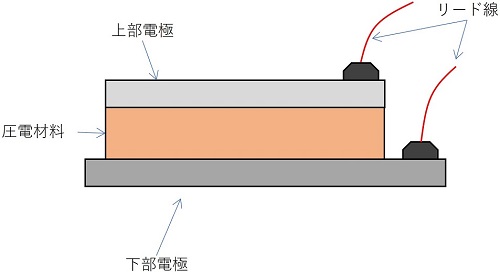
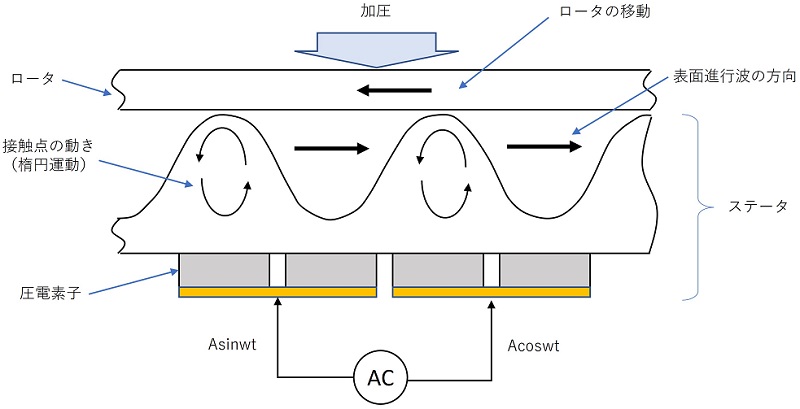
超音波モータは電磁作用で回転するモータではありません。圧電素子を振動させ、その振動を利用して回転子を駆動します。圧電素子は、電圧をかけると変形する特性のある素子を使います。ピエゾ素子と言われます。駆動周波数が人間の可聴周波数域よりも高いため、「超音波」と名づけられています。図27はピエゾ素子の構造です。圧電材料を二枚の電極で挟む構造です。超音波モータの動作原理は「進行波形」と「定在波形」に分けられます。常時、摩擦力が発生しているので、非通電時でも位置を保持することができます。使用用途は、カメラのレンズを動かすオートフォーカスなどがあります。実用化されている製品の主流原理は進行波形です。図28は進行波形の動作イメージです。
③静電気モータ
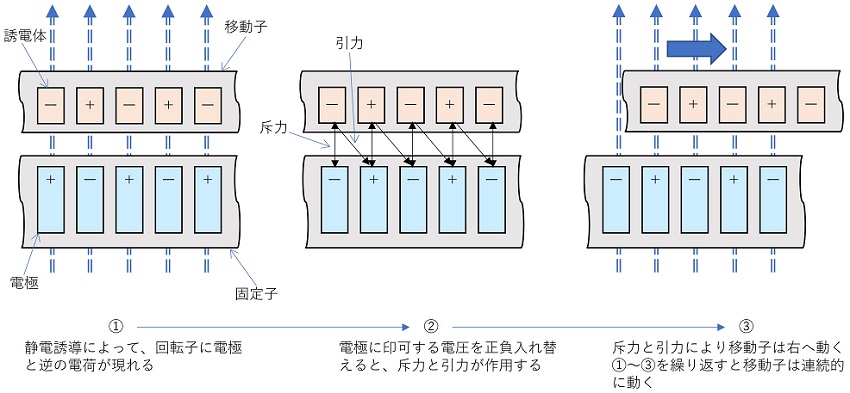
静電荷間に作用する「クーロン力」で回転子を動作させます。基本原理は18世紀ごろですが、電圧の生成や素子の製法などの理由から実用化にいたらなかったです。2020年に「シチズン時計」が腕時計に適用した製品を発表し注目されました。静電気を利用した「静電発電機」と「静電モータ」の2つの機構を搭載しています。「静電発電機」で電力を発生させ、二次電池に蓄えます。その電力で「回転子」を回し、時計の機能を実現しています。詳細はシチズン時計株式会社のサイトをご覧ください。図29は静電気モータの動作原理です。静電誘導を利用しています。静電誘導とは、導体に帯電体を近づけた時、帯電体の近い部分に帯電体と反対の電荷が生じる現象です。コンデンサはこの原理を活用しています。
④分子モータ
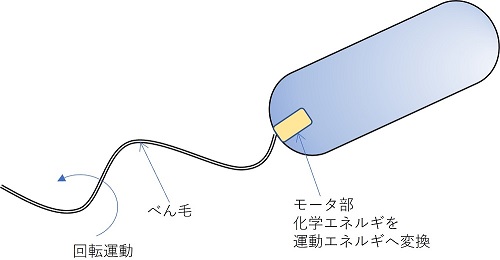
細菌などの単細胞生物は、細胞内の化学エネルギを運動エネルギに変換する機能を保有しています。この機能を有した分子を分子モータと呼ばれます。単細胞生物の多くは「べん毛」と呼ばれる「らせん状の繊維」を本体から延ばし、べん毛の根本にある回転モータを回すことで水中を動きます。モータ部の直径は45ナノメートルほどですが、回転数は20,000rpm以上です。また、エネルギの変換効率は100%に近いようです。人工的にモータ部を製作できれば新たな用途への展開が可能でしょう。モータ部の構造は各所の情報をご覧ください※3。
モータの要素技術
1 損失軽減
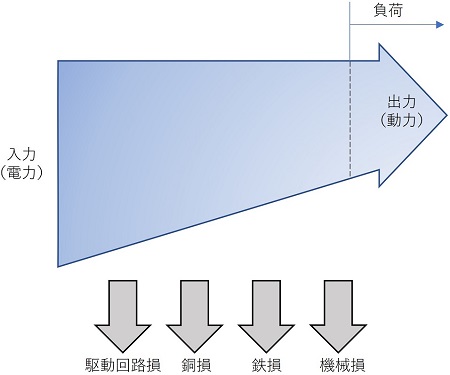
モータは電気的エネルギを機械的エネルギへ変換する機能をもっていますが、エネルギを変換する過程で損失が発生します。損失の要因として、1)モータ駆動回路、2)銅損、3)鉄損、4)機械損があります。中でも、大きな割合を占めるのが、銅損と鉄損になります。
銅損:コイルの巻き線に使われる導線の電気抵抗による損失です。電気エネルギが熱となって逃げていく現象です。電流の二乗に比例します。
鉄損:コイルの鉄心に発生する損失です。ヒステリシス損失と渦電流損失を合算したものです。どちらの損失もコイルの電流変化による磁界の変化やコイルの磁界が移動することで発生します。ヒステリシス損失はコイルの磁界強度の高まりにより鉄心の磁束密度が高まり、ピークに達すると逆に磁界強度が下がり、鉄心の磁束密度が下がります。このとき上がる時と下がる時が同じ特性になりません。これがヒステリシス現象です。一方、渦電流損失は鉄心に発生する渦電流が熱となって逃げる損失です。鉄心の材料は「磁気は通りやすく、電流は流れにくい」材料を選択します。そのため、ケイ素鋼板が一般的に使用されます。また、渦電流の大きさは鉄心材の厚さの二乗に比例する特性なので、薄い鉄板を重ねて渦電流の発生を抑制します。
2 巻線の形状
電動車の電費※4を向上させるために、モータの軽量化や効率・出力特性の向上は重要な要素です。駆動用モータにおいて、要素部品の巻線の方式や構造は課題解決の主要な技術です。各社のモータではコイルの形状は丸線もしくは、ヘアピンと呼ばれる角線が採用されています。おのおのの巻き線方式には特徴がありますが、評価手法として、コア部に占める巻線の占積率※5があります。一般的には角線方式の方が占積率は高くなりますが、巻き線の出来上がり品質、工程の複雑さ、設備投資など、性能とコストを考慮して選択されます。
内燃機関の燃費に相当する効率の指標。
ステータのスロットと呼ばれるコイルを収めるスペースに占める銅線の割合。ステータ内の銅線の巻き数が多いほど出力特性は向上。
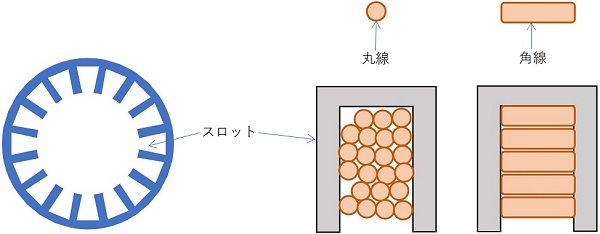
3 巻線の方式
固定子にコイルを巻く方式は、各固定子のスロットごとに巻く集中巻と、スロットをまたいで巻く分布巻があります。集中巻はコイル端のロスが少ないですが、騒音が大きくなる傾向です。分布巻はコイル端のロスが多いものの、回転が滑らかで静かです。電動車の駆動用モータでは、主として分布巻が採用されています。
4 コイルの結線
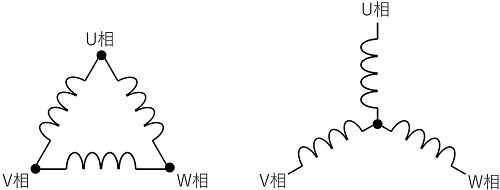
三相ブラシレス直流モータの3つのコイルを結線する方式は二種類あります。各コイルの一端を一か所で結線するスター結線と、3つのコイルをループする結線、デルタ結線があります。図34は各結線の構造です。スター結線は二つのコイルに電流が流れます。デルタ結線は常に3つのコイルに電流が流れます。同じ電源電圧を印可する場合、デルタ結線の方が高い電流が流れるので、得られるトルクは高くなります。電力の効率はスター結線の方が優れるので、ブラシレス直流モータではスター結線を適用する例が主流です。
5 磁石
磁石の発見時期は諸説ありますが、紀元前にさかのぼります。日本では「続日本書紀(797年)」に磁石に関する記述があります。自動車の電動化に不可欠な駆動用モータには、いわゆる希土類の素材が添加された「ネオジム磁石」が採用されています。発明したのは、「佐川眞人」ら住友特殊金属(日立金属が吸収。その後、現 プロテリアル)です。当時の主流はサマリウム・コバルト磁石(SmCo磁石)でしたが、磁石特性を大幅に向上させる方策として、ネオジム(Nd)を添加しました。更に、耐熱性を向上させるため、ジスプロシウム(Dy)、テルビウム(Tb)の添加を発案しました。なお、ネオジムやジスプロシウムは希土類と表現される通り、自然界の埋蔵量や採取地が限られていることから、資源リスクが大きな課題となっています。そのため、希土類の添加量を抑制した磁石や、そもそも全く使用しない磁石の製法が発案されつつあります。なお、磁石の特性を大幅に改善したのは、1917年の「本田光太郎」による永久磁石のKS鋼です。
関連計測器の紹介
モータに関連した計測器の一例を紹介します。

その他の製品や仕様については 計測器情報ページ から検索してください。
おわりに
本稿ではモータに関する技術を紹介しました。これまで、自動車の動力として内燃機関が担ってきましたが、今後は、カーボンニュートラルやグリーントランスフォーメンションに向けて、モータをベースとした動力源へ移行するでしょう。モータの基本原理は大きく変化しないと推察されますが、キー素材の磁石や構造は着実に進化していくことを期待できます。
自動車関連の他の記事は こちらから