自動運転を支える技術~安心安全技術の進化
自動運転化の技術
自動運転化技術で基本となるセンサは、カメラとレーダです。レーダには電波を使うミリ波レーダと光を使うLiDAR(Light Detection and Ranging ライダと呼称)があります。その他のセンサとして赤外線カメラや超音波センサが加えられることがあります。
それでは、カメラ、ミリ波、LiDARに絞ってそれぞれの特徴を説明します。カメラは白線や標識、ほかの車両、周囲の環境などを検出することが可能です。しかし、暗闇や極端に明るい光、悪天候などには弱い特性です。ミリ波レーダは、ミリ波と呼ばれる周波数の電波を発射し、その反射波を測定する装置です。雨や霧も通過できるため悪天候にも強く、他車両との相対速度を検出できます。ただし、検出する対象物に対する分解能があまり高くなく、また、歩行者や草木など電波の反射率が低い物体の検出を苦手とします。LiDARは、対象物に対する方位分解能が高く、距離や位置関係も精度良く検出できます。車両、白線や標識、樹木などの電波反射率が低い物体も検出できます。しかし、雨や霧などの悪天候では検出精度が低下します。
現状のセンシング技術では1種類のセンサで全ての情報を検出することは難しいので、色々なセンサを組み合わせています。それでは、3方式の一般的な検出手法について説明します。詳細な技術内容については他の文献等を参照してください。
1 カメラ
車載カメラの機能として日本車で一般的に装備されているのは、後方モニタと白線や歩行者、先行車の認識です。本稿では画像による認識機能(以降、画像認識)について解説します。なお、米国では2018年から後方をモニタするカメラの装着が義務化されています。画像認識システムの基本構成は、カメラ部、画像処理部です。カメラの撮像素子としてCCD(Charge Coupled Device)とCMOS(Complementary Metal Oxide Semiconductor)などがありますが、最近はCMOSが主流となっています。カメラの基本方式として単眼カメラとステレオカメラとに分類されます。単眼カメラとステレオカメラのいずれも市販車で採用されていまが、両方式の方向性については、自動車メーカや車種による使い分けがあり、一方に集約されるかどうかは明確でありません。
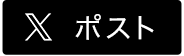
まず、ステレオカメラの基本原理について解説します。ステレオカメラは対象物の距離を取得することが可能です。2つのカメラで得られた対象物の画素情報にもとづいて、三角測量の原理を用い距離を算出します。対象物の画素を抽出することはステレオマッチングと呼ばれています。ステレオマッチング処理には多くの手法が考案されています。
単眼カメラでも対象物までの距離を算出する各種の方法が提案されています。市場で有力なカメラシステムのサプライヤでも単眼カメラ方式を採用しています。
カメラでは、多くの対象物を検出しています。例えば、歩行者、車両、バイク、自転車、白線、レーンマーク、道路標識、対向車のヘッドライトなどです。車室内のカメラでは運転者の状態(脇見、居眠り)を検出する機能も採用されています。認識する対象物を検出する手法としてはパターン認識が主流ですが、検出性能を向上させるために多くの認識手法を組み合わせたり、AI(Artificial Intelligence 人工知能)が適用されています。
2 ミリ波センサ
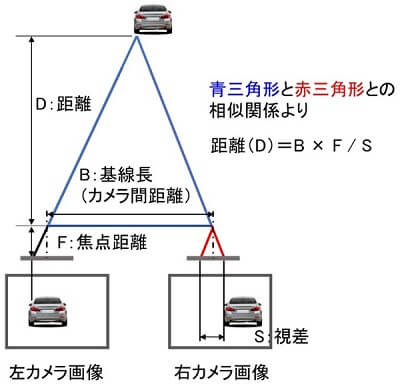
レーダに求められる基本特性は対象物の距離と速度です。レーダの方式としては、パルス方式、CW方式、SS方式、FMCW(Frequency Modulated Continuous Wave 周波数連続変調)方式などがあります。車載レーダで主として採用されているFMCW方式を例にして、センシングの原理を説明します。FMCW方式レーダの基本構成は図7です。
基本動作は、以下の通りです。詳細は他の文献等を参照してください。
- 1)発振器で変調波を生成。変調波は単調増加する信号と単調減少する信号を交互に生成
- 2)送信アンテナから変調波を送信
- 3)対象物から反射した反射波を受信アンテナで受信
- 4)ミキサで送信波と受信波を合成し、ビート信号を生成
- 5)ビート信号をADC(アナログデジタル変換)したデータを、各種の信号処理を行い、距離と速度を計算
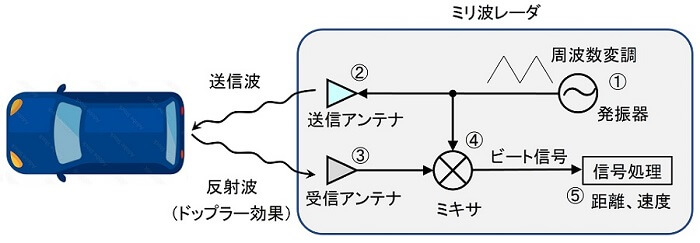
対象物の方位を検出する方法も色々採用されています。初期のレーダではアンテナを機械的に走査する方式もありましたが、半導体の進化や認識処理技術の高度化により、電子走査方式が主流となっています。代表的な方式として、デジタルビームフォーミング(Digital Beam Forming)があります。反射波が到来する方向に応じて、アンテナ毎に到達する時間差が生じます。この時間差を使い色々な信号処理を適用して方位角を算出します。
以上説明したFMCW方式では水平方向の情報しか得られません。水平方向、垂直方向、距離の3次元情報を生成する方式として、MIMO(Multiple-input-multiple-output)技術などがあります。詳細な技術内容は他の文献等を参照してください。
3 LiDAR
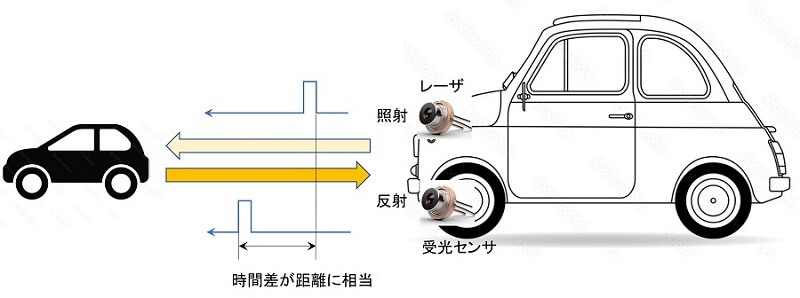
レーザダイオードで発光させた近赤外光を検出する対象物に照射し、その反射光を光センサで受光して距離を測定する方式です。レーザー光をパルス状に照射し、対象物に当たって跳ね返ってくるまでの時間差を計測します。この方式はToF(Time of Flight)と言われています。検出される距離と時間の関係は次式です。図9に距離を計測する方法を示します。
L=cΔt/2 L:対象物との距離、c:光速、Δt:対象物との往復距離分の時間
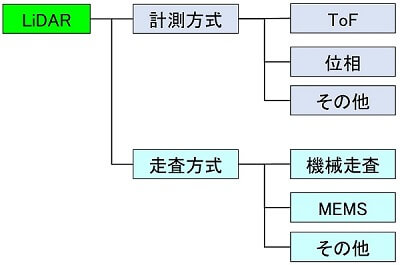
その他の方式として、ミリ波レーダで主流であるFMCW方式のLiDARへの適用が検討されていますが、先進技術のため情報開示は少ないです。今後の進展が期待されます。LiDARでは照射する光を左右方向、上下方向に走査することで、距離の二次元情報が得られます。対象物までの距離だけでなく、ソフトウェアの処理により、形状や位置の検出が可能です。走査する方式としては機構部品による方式や電子式があります。最近は半導体のMEMS(Micro Electro Mechanical Systems)を使った電子メカ式が主流となっています。
新たな方式として、米国のベンチャー企業が2021年6月にフラッシュLiDARと称する3次元計測が可能なLiDAR技術を公表しました。今後の展開を期待しましょう。LiDARの技術をまとめると図10となります。
4 ダイナミックマップ
自動運転化では、車両がカメラやレーダの情報にもとづく自律的技術だけでなく、インフラ側との協調技術が必要になります。そのひとつとして、ダイナミックマップ※5があります。ダイナミックマップは高精度の3次元地図と、時間とともに変化する動的情報(信号情報、事故情報、道路工事情報など)を紐付けたものです。高精度3次元地図を整備するため、自動車メーカや電機メーカ、地図会社などが共同出資して2017年6月に事業会社へ移行しました。モービルマッピングシステム※6を用いて、全国の高速道路や自動車専用道を計測しています。センチメートル級の絶対精度を実現しています。
官民ITS構想・ロードマップ2016で定義されている。「道路及びその周辺に係る自車両の位置が車線レベルで特定できる高精度三次元地理空間情報(基盤的地図情報)及び、その上に自動走行等をサポートするために必要な各種の付加的地図情報(例えば、速度制限など静的情報に加え、事故・工事情報など動的情報を含めた交通規制情報等)を載せたもの」
(Mobile Mapping System)GPSやカメラ、3次元レーザスキャナなどを搭載した車両で計測。
関連計測器の紹介
安心安全システムの開発で使用される計測器の一例を紹介します。

その他の製品や仕様については 計測器情報ページ から検索してください。
おわりに
自動車の自動運転化は社会全体を大きく変えていくと言われています。交通事故の削減、交通渋滞の減少、環境への影響抑制、雇用の創出など大きな成果が期待されています。その基本となるのが安心安全技術です。今後も、技術進化はさらに加速し推進されるでしょう。
自動車関連の他の記事はこちらから